Highway and urban road lane line identification method
A technology for lane line recognition and high-speed road sections, which is applied in the field of image processing, can solve problems such as difficult detection of lane lines, and achieve the effects of enhanced real-time performance, high recognition accuracy, and improved accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
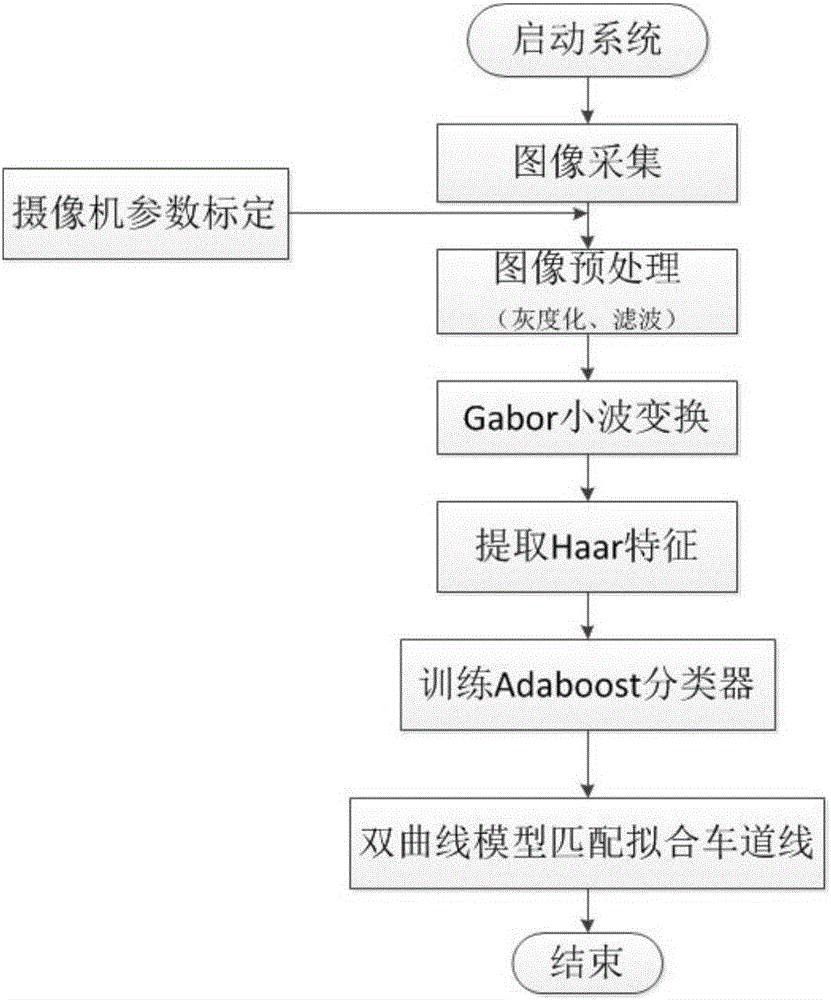
[0054] combine figure 1 , a highway segment and urban road lane line identification method, comprising the following steps:
[0055] Step 1. Obtain the road image through the camera and calculate the relevant parameters
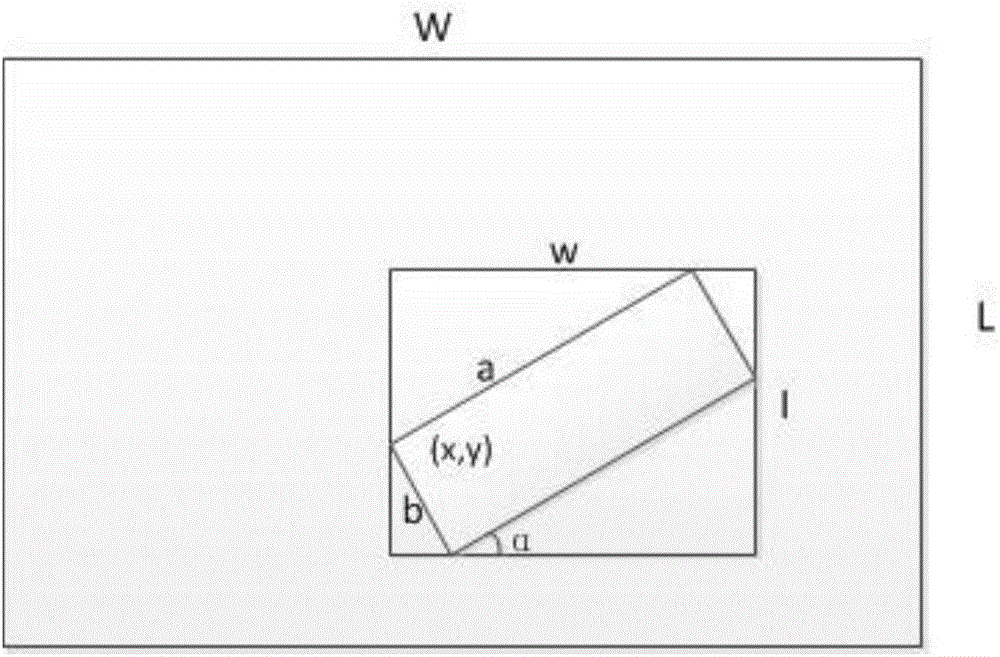
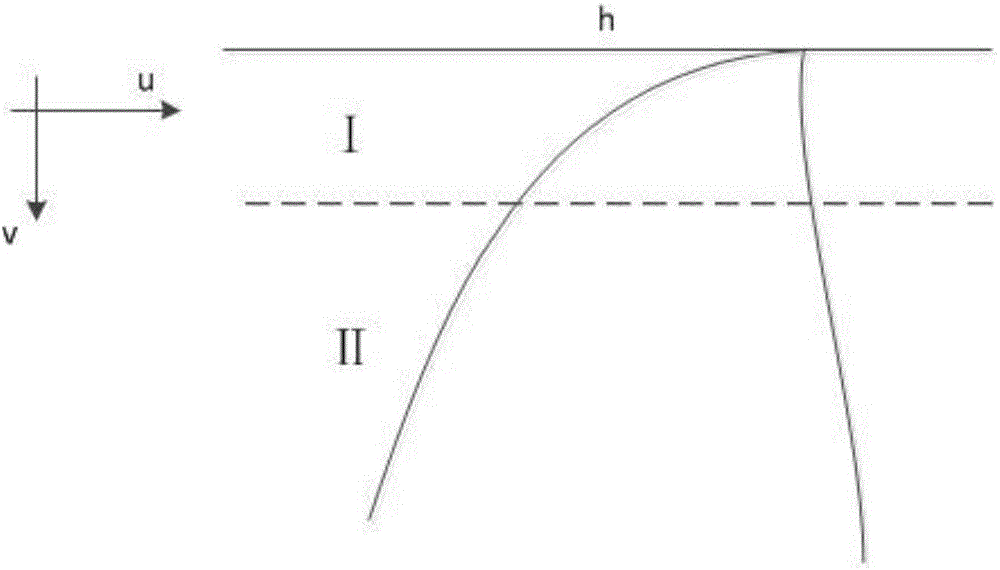
[0056] The image coordinates obtained by the camera are (u, v), and the mapping coordinates on the road surface coordinate system are (x, y). The camera is placed at a height h from the ground, and the deflection angle is Let the coordinates of point P in the road surface coordinate system be [x, y, z] T , while the coordinates of point P in the image coordinate system are [wu,wv,w] T , the corresponding relationship is where K is the camera calibration matrix, R is the rotation matrix, I is the identity matrix, [I 3×3|-T] is the concatenation of I and T, T=[0,0,h] T , the z coordinate of the road surface in the road surface coordinate system is 0, (u c ,v c ) is the principal point position of the image coordinate plane, and f is the effective f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More