Automatic free-form surface polishing and grinding system with industrial robot and method
An industrial robot and robot technology, applied in grinding/polishing equipment, automatic grinding control devices, grinding machines, etc., can solve problems such as difficult automatic grinding and polishing of robots, and achieve constant contact pressure, adjustable contact pressure, and easy operation Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
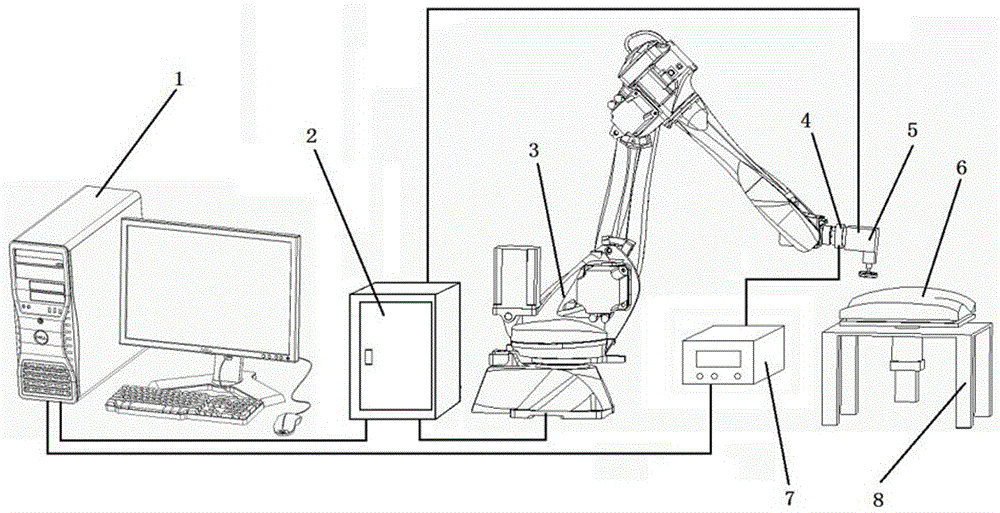
[0050] like figure 1 As shown in 7, the present embodiment provides a free-form surface industrial robot automatic grinding and polishing system and method, mainly including a host computer 1, a robot controller 2, an industrial robot 3, a force sensor 4, a signal collector 7, a grinding Throwing device 5, workpiece 6 and workbench 8, wherein:
[0051] The industrial robot 3 is a general-purpose six-degree-of-freedom industrial robot.
[0052] The industrial robot 3 is connected with the robot controller 2;
[0053] The robot controller 2 is connected with the upper computer 1;
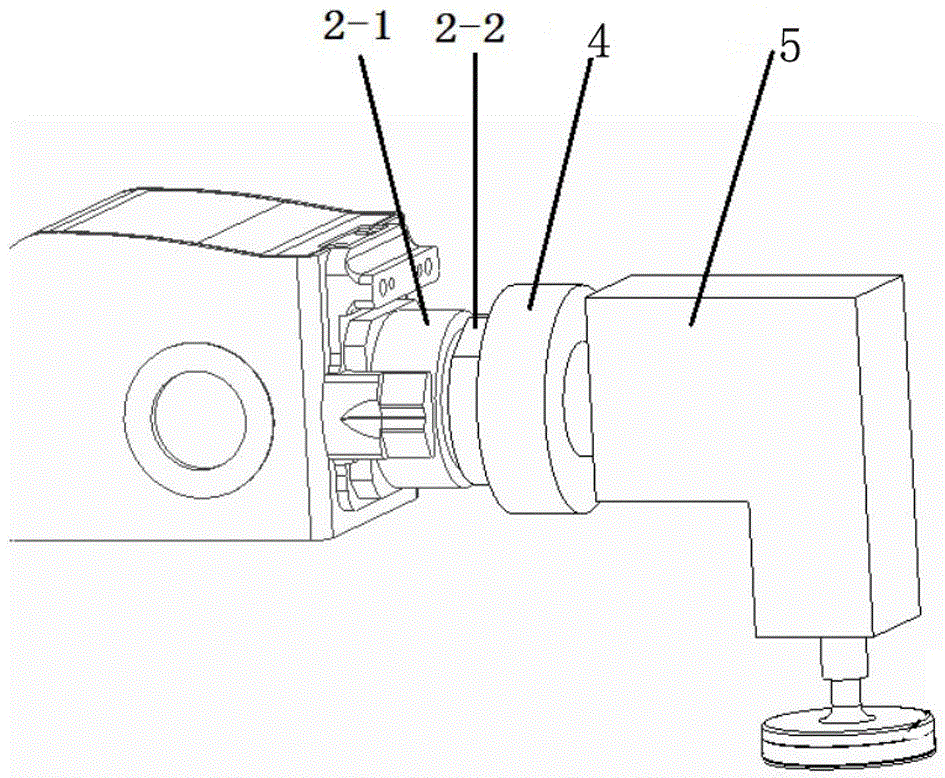
[0054] The force sensor 4 is connected with the signal collector 7;
[0055] The signal collector 7 is connected with the upper computer 1;
[0056] The drive mode of the grinding and polishing device 5 is electric drive;
[0057] The grinding and polishing device 5 is co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More