

Flexible vector tactile and slip composite sensor
A composite sensor and flexible technology, applied in the direction of instruments, measuring forces, measuring devices, etc., can solve the problems of inability to detect slippage, the sensor has no anti-skid function, etc., to achieve the effect of safe clamping, simple electrode layer structure, and satisfying use conditions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
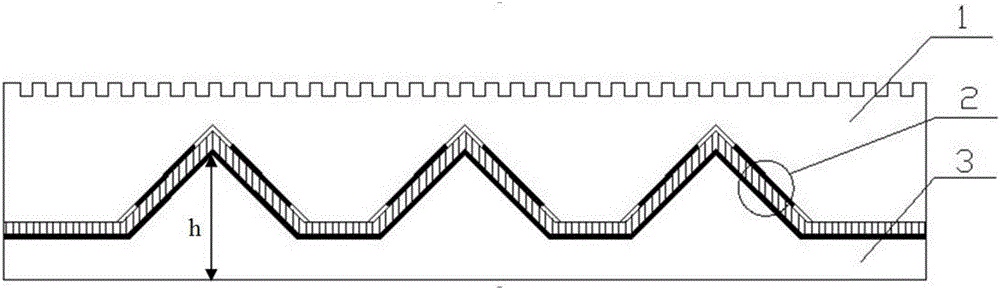
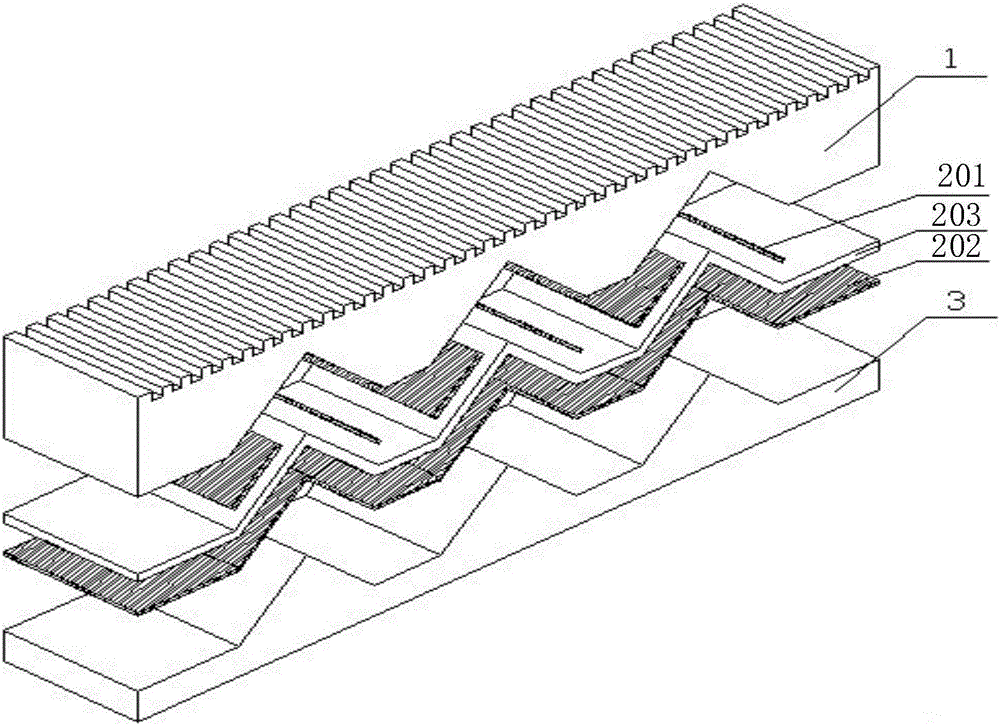
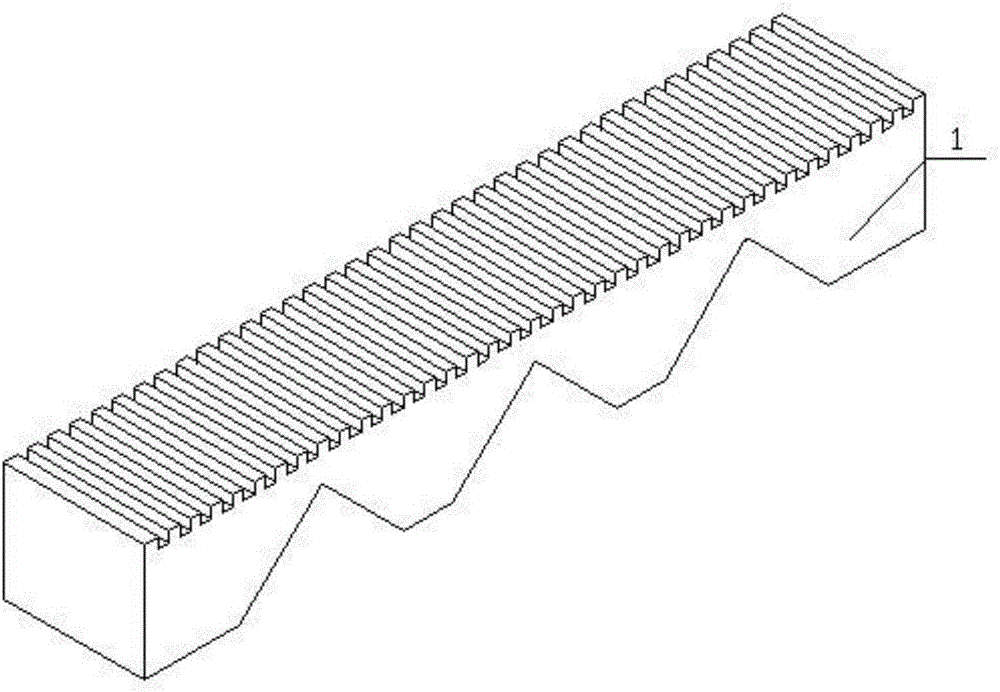
[0025] The invention provides a flexible vector touch-slip composite sensor, the sensor is a cuboid structure as a whole, the surface has an array of microstructures at equal intervals, which are used to contact and conduct surface normal pressure or friction; the middle layer has multiple pairs of forces The sensitive unit provides differential output signals; the bottom surface is bonded to the surface of the robot hand or instrument. The paired force-sensitive units are respectively located on both sides of the symmetrical protrusion structure. Specifically, such as figure 1 and figure 2 As shown, the sensor includes: an upper flexible substrate 1, a force-sensitive structural layer 2 and a lower flexible substrate 3, and the force-sensitive structural layer 2 includes an upper electrode layer 201, a bottom electrode layer 202 and an upper elect...
PUM
| Property | Measurement | Unit |
|---|---|---|
| thickness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More