

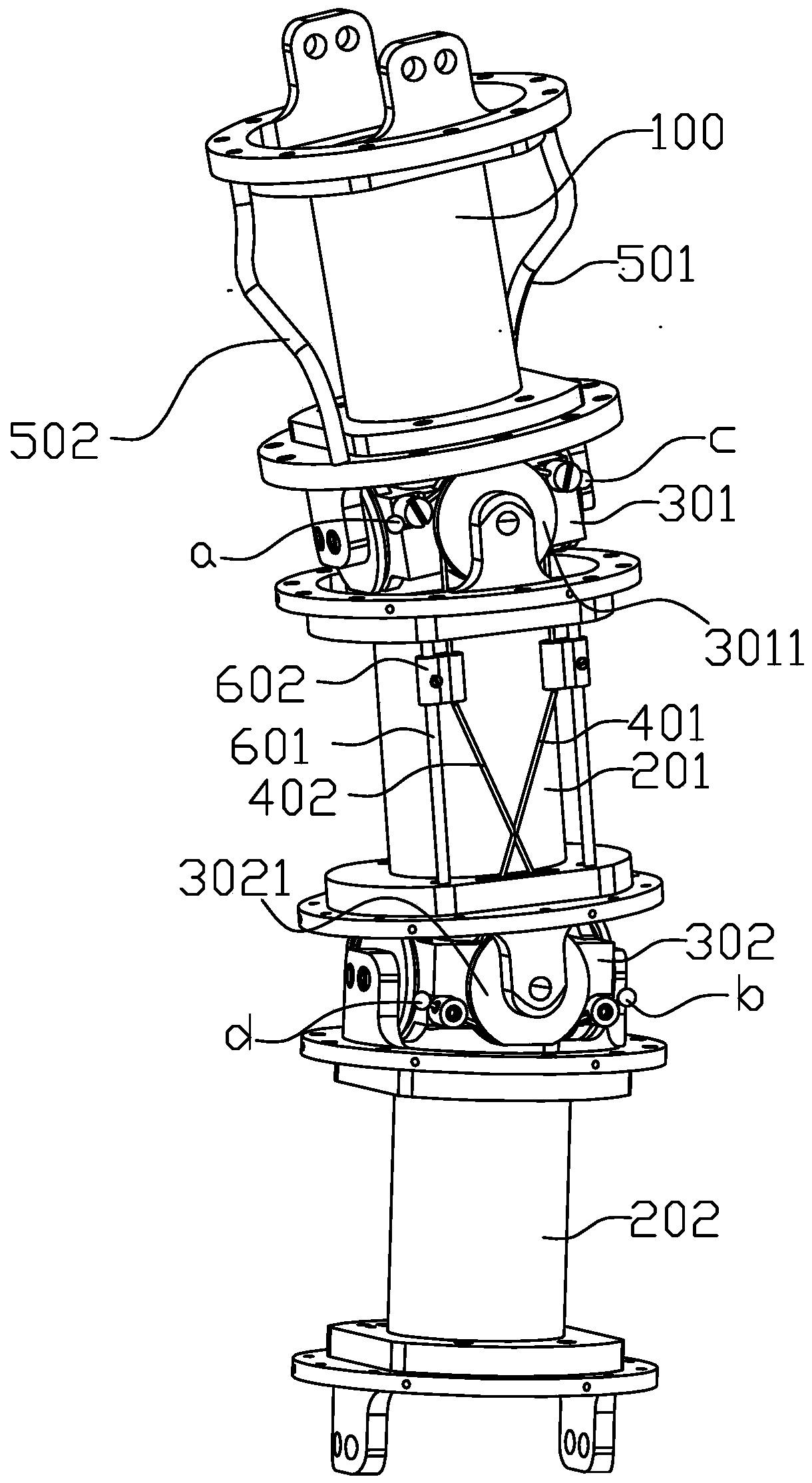
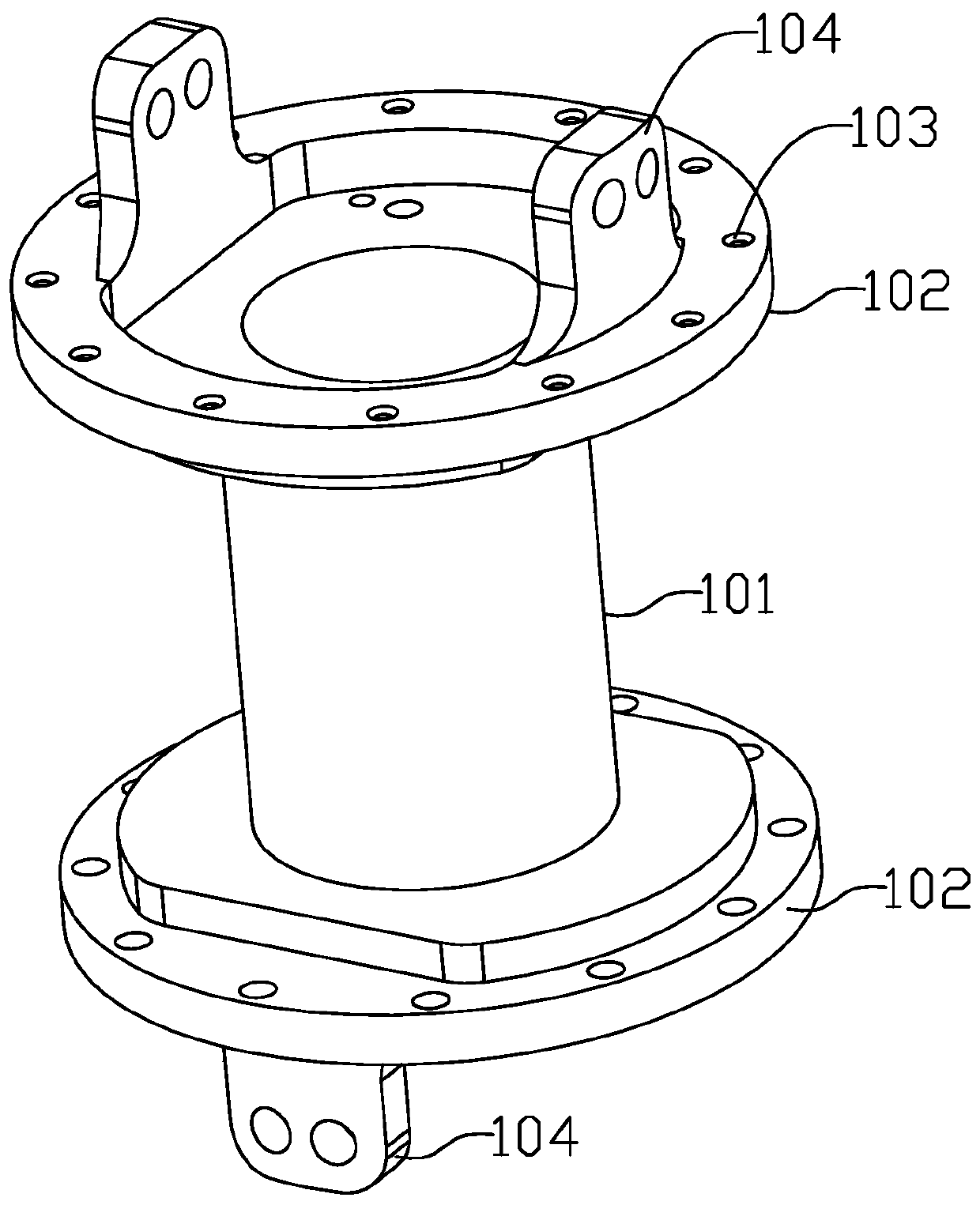
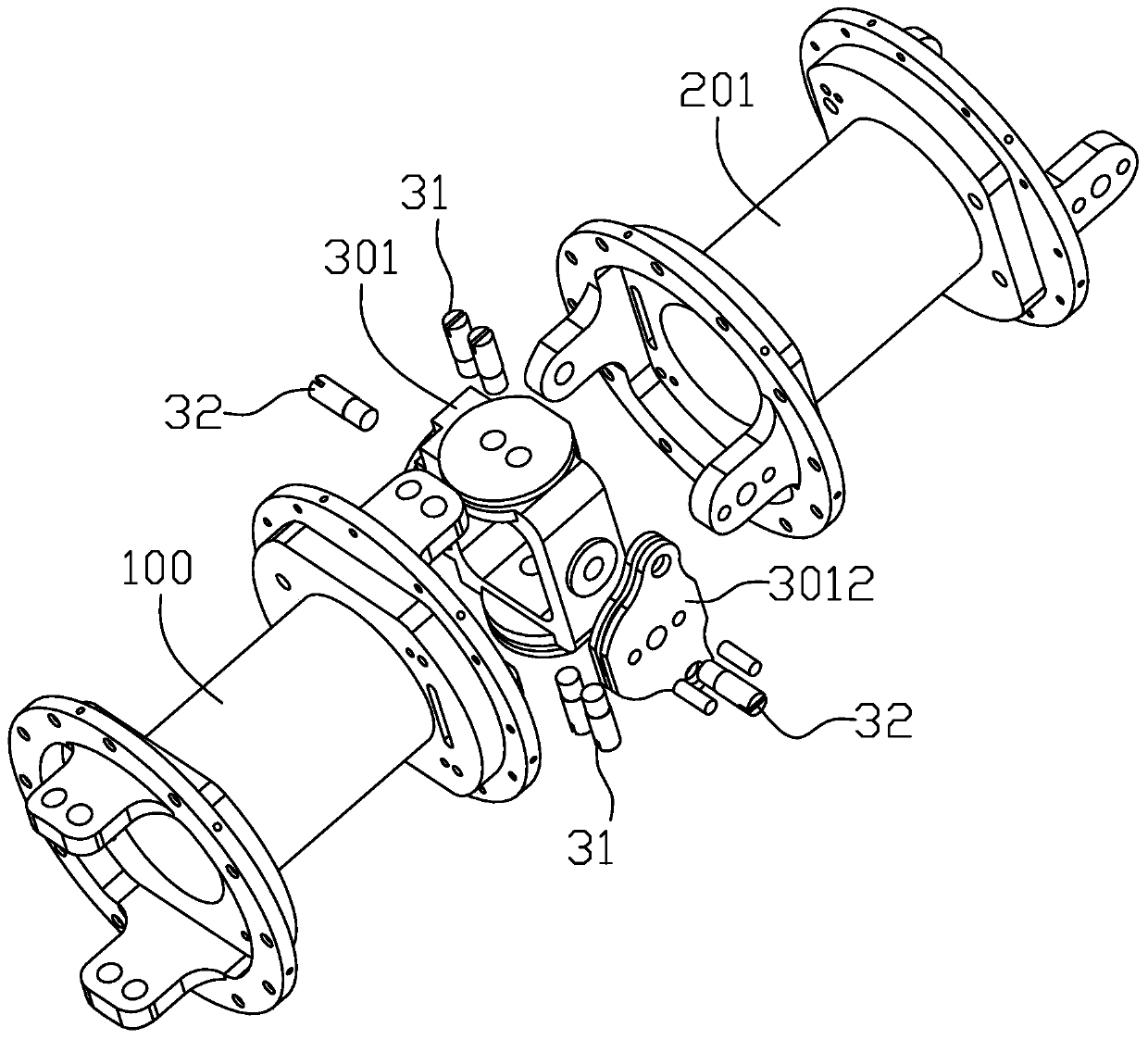
A single-degree-of-freedom linkage flexible charging robot joint group
A technology of robot joints and degrees of freedom, applied in the field of joint groups, can solve problems such as the ability to affect the space movement of the load capacity, reduce the stiffness of the mechanical arm, reduce the system stability, etc., to achieve strong rigidity, high load capacity, and improved response speed. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The idea, specific structure and technical effects of the present invention will be clearly and completely described below in conjunction with the embodiments and accompanying drawings, so as to fully understand the purpose, scheme and effect of the present invention. It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other.
[0027] It should be noted that, unless otherwise specified, when a feature is called "fixed" or "connected" to another feature, it can be directly fixed and connected to another feature, or indirectly fixed and connected to another feature. on a feature. In addition, descriptions such as up, down, left, and right used in the present invention are only relative to the mutual positional relationship of the components of the present invention in the drawings.
[0028] Also, unless defined otherwise, all technical and scientific terms used herei...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More