Quadruped bio-robot
A bionic robot and driving motor technology, applied in the field of robots, can solve problems such as poor balance, low stability, and complex robots, and achieve the effects of simple structure, continuous jumping action, and flexible movement.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
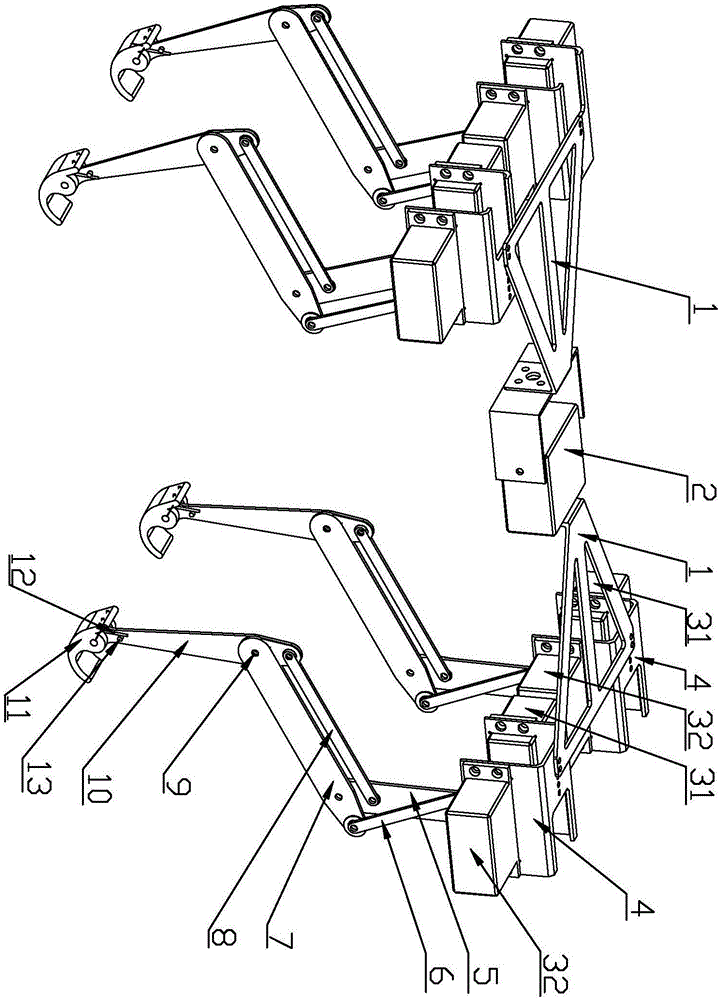
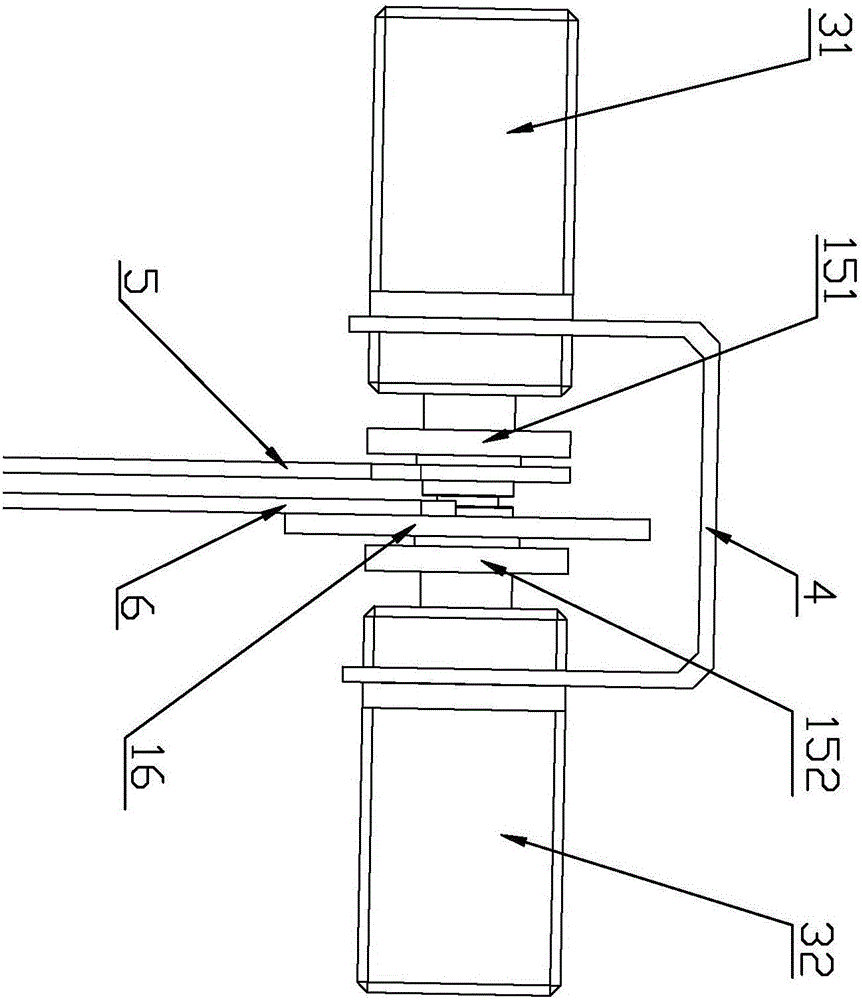
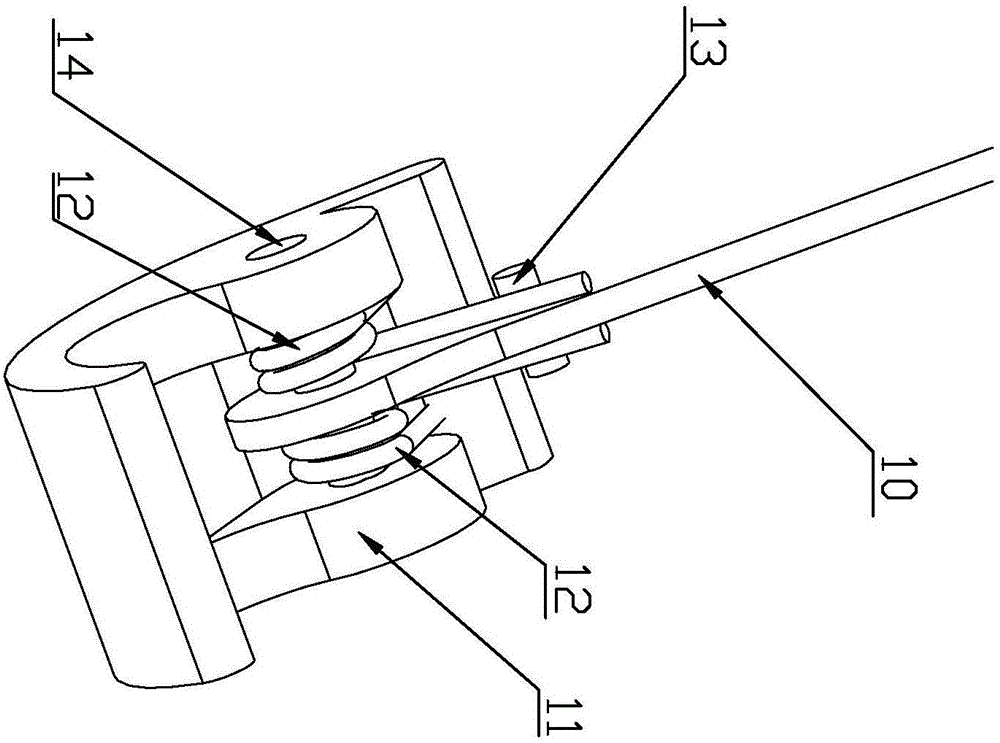
[0023] refer to Figure 1 to Figure 3 , the present invention is a quadruped bionic robot, including a control system and a mechanical system, the mechanical system includes two torsos 1 and a waist adjustment motor 2 arranged between the two torsos 1 for adjusting the swing of the two torsos 1, and the two torsos 1 are connected with Two leg mechanisms, each leg mechanism includes a multi-degree-of-freedom hybrid mechanism and a driving motor that drives the hybrid mechanism to swing, the swing axis of the hybrid mechanism is parallel to the swing axes of the two torsos 1, and the control system coordinates and controls the waist adjustment motor 2 and the driving motor realize the continuous swing of the two trunks 1 and the four leg mechanisms to realize the jumping motion.
[0024] Through the setting of the waist adjustment motor 2 and the four leg mechanisms, the control system coordinates and controls the waist adjustment motor 2 and each driving motor to drive the two ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com