

Method and system for setting smart car walking path based on mobile terminal scribing
A smart car and mobile terminal technology, applied in motor vehicles, control/regulation systems, non-electric variable control, etc., can solve the problems of costing materials, labor and time, and achieve the effect of simplifying the management and maintenance process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
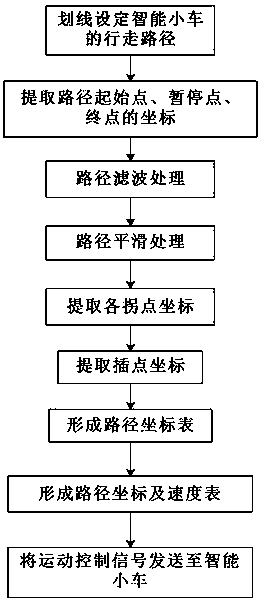
[0060] Step 1. The operator draws a line on the smart mobile terminal to set the walking path of the smart car, such as Figure 4 , where A is the starting point, dots B and E are pause points, C and D are inflection points, and F is the end point. Sections AB and DE represent the ripple section of hand shaking when drawing a line;
[0061] Step 2: The smart mobile terminal collects the path defined by the operator, and extracts the coordinates of the starting point of the path A (Xa, Ya), the coordinates of the pause point B (Xb, Yb), E (Xe, Ye), and the end point F (Xf, Yf). coordinate;
[0062] Step 3: filter the path, and then perform smoothing, and then extract the coordinates C(Xc,Yc) and D(Xd,Yd) of each inflection point, such as Figure 5 ;
[0063] Step 4. Extract the interpolation point coordinates: such as Figure 6 As shown, insert several insertion points M1~M29 between the AB segments, and calculate the coordinates of the next insertion point M1(Xm1,Ym1)~M29(X...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More