

Intelligent wheel-type multi-manipulator ball picking-up robot
A technology of manipulators and robots, applied in the field of intelligent robots, can solve problems such as the large number of small balls, the inability to navigate and locate the robot, and the inability to plan the global path of picking up the ball.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described in detail below in conjunction with the accompanying drawings, so that those skilled in the art can implement it with reference to the description.
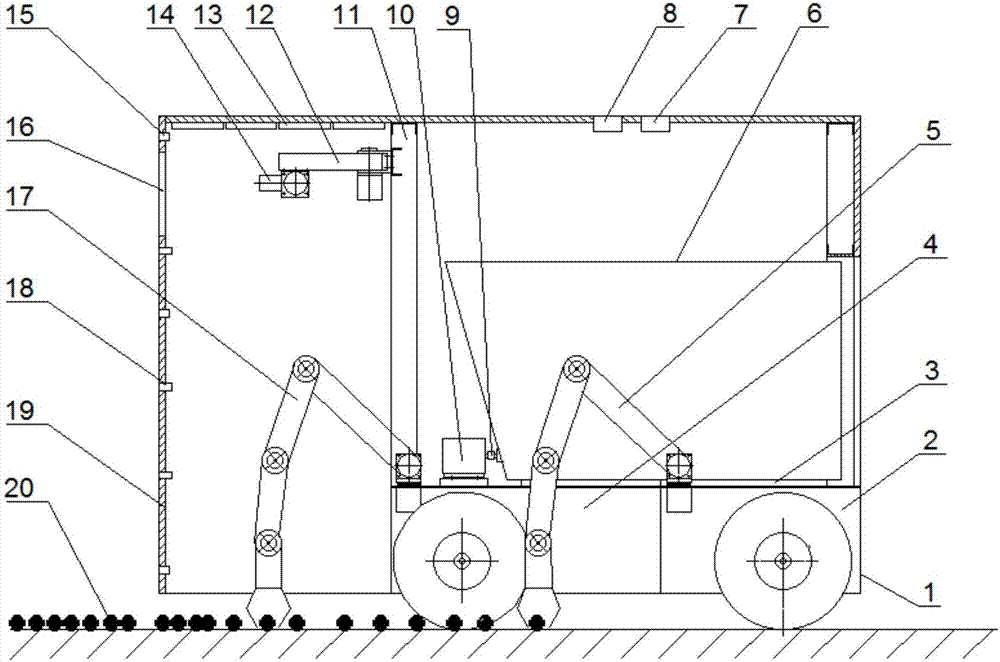
[0028] Such as figure 1 As shown, the present invention provides a wheeled multi-manipulator intelligent ball-picking robot, which includes a car body 1, and a protective cover 19 is arranged on the periphery of the car body 1 to protect the car body.
[0029] A locator is provided on the top of the protective cover 19 for positioning. Described locator comprises GPS module 8 and RFID reader-writer 7, and GPS module 8 carries out global positioning; RFID reader-writer 7, carries out regional positioning, and by the cooperative use of GPS module 8 and RFID reader-writer 7, makes positioning process fast ,precise.
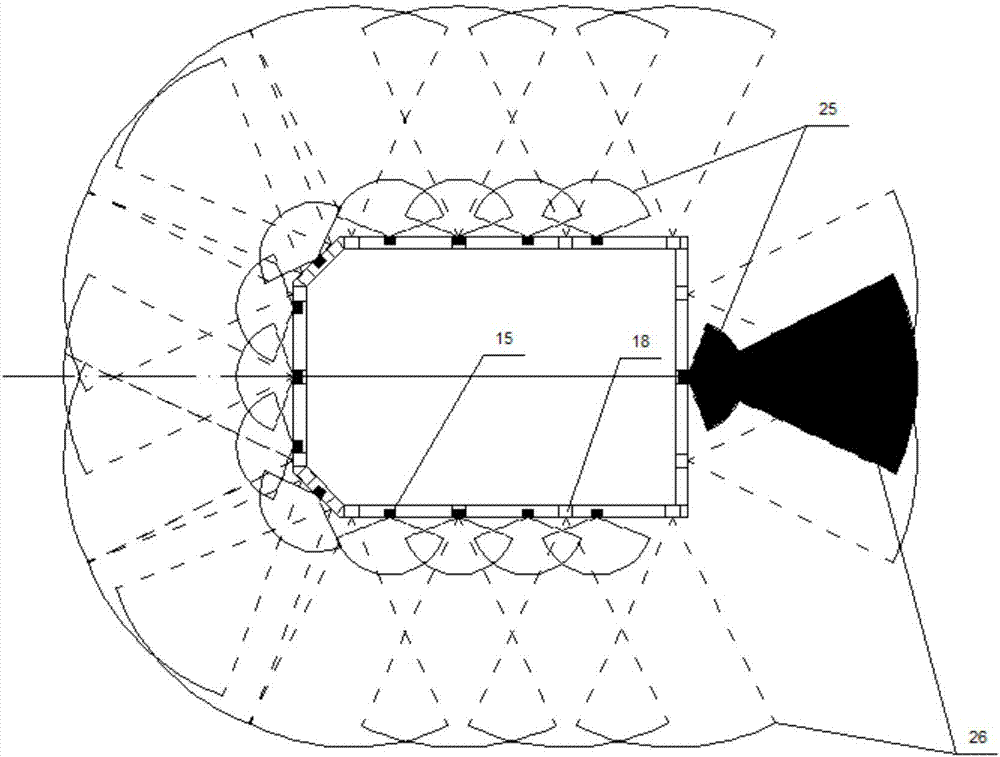
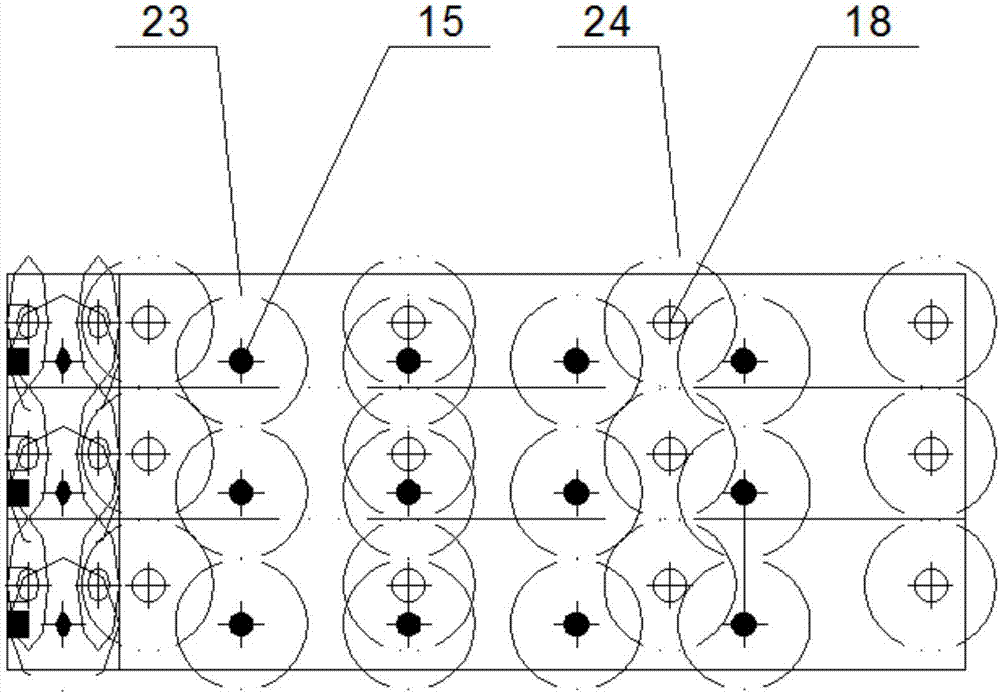
[0030] Such as figure 1 , figure 2 , image 3 As shown, distance detection sensors are arranged around the protective cover 19 for detecting obstacles. The d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More