A visual control method of industrial manipulator based on deep convolutional neural network
A deep convolution and neural network technology, applied in the field of visual control of industrial manipulators based on deep convolutional neural networks, can solve the problems of low sensor accuracy, high complexity, and inability to use industrial production
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The present invention will be further described below in conjunction with specific examples.
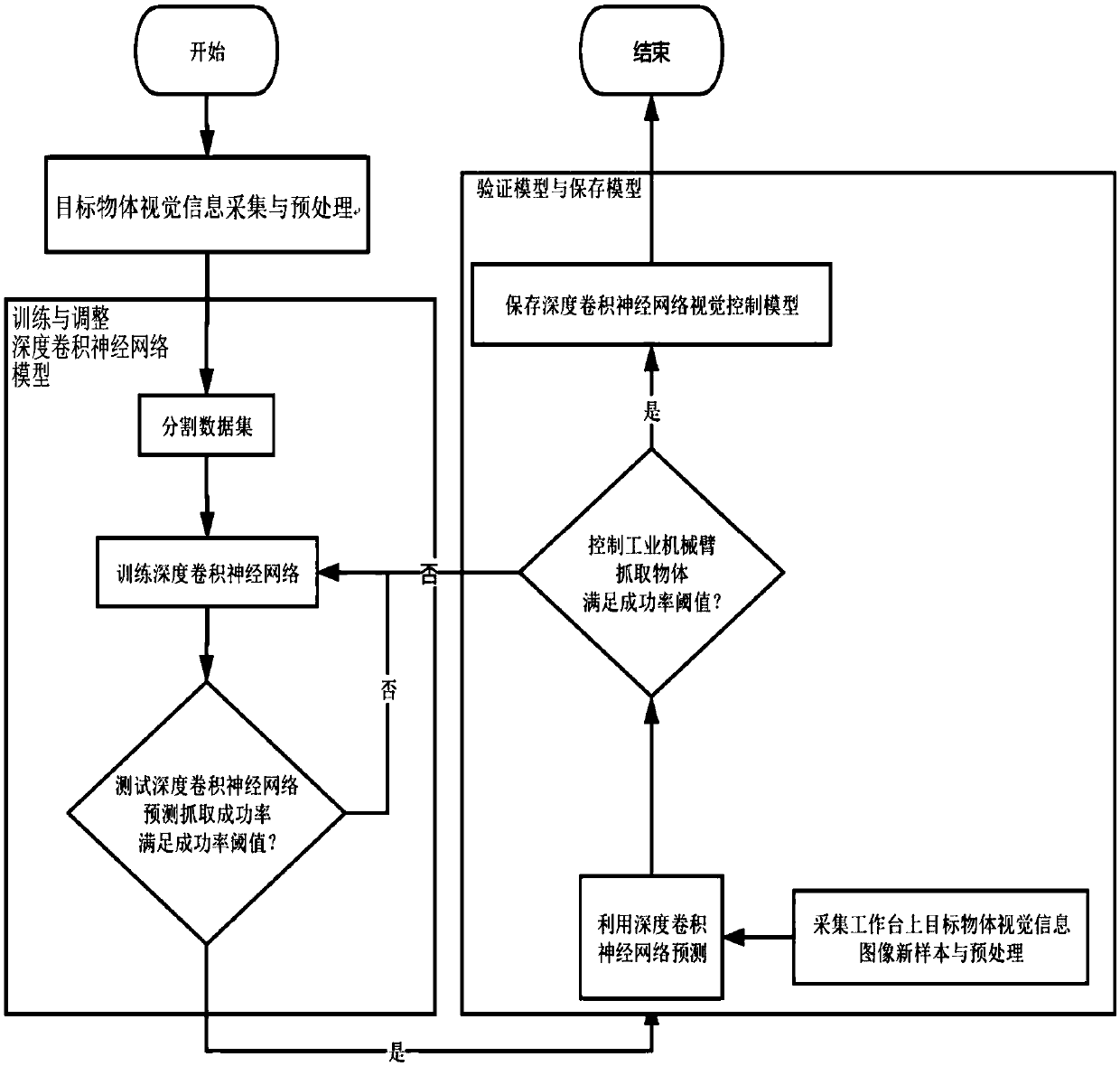
[0060] Take the six-degree-of-freedom redundant industrial robot arm as an example, such as figure 1 As shown, the industrial manipulator vision control method based on the deep convolutional neural network of this embodiment specifically includes the following steps:
[0061] 1) Acquisition and preprocessing of target object visual information
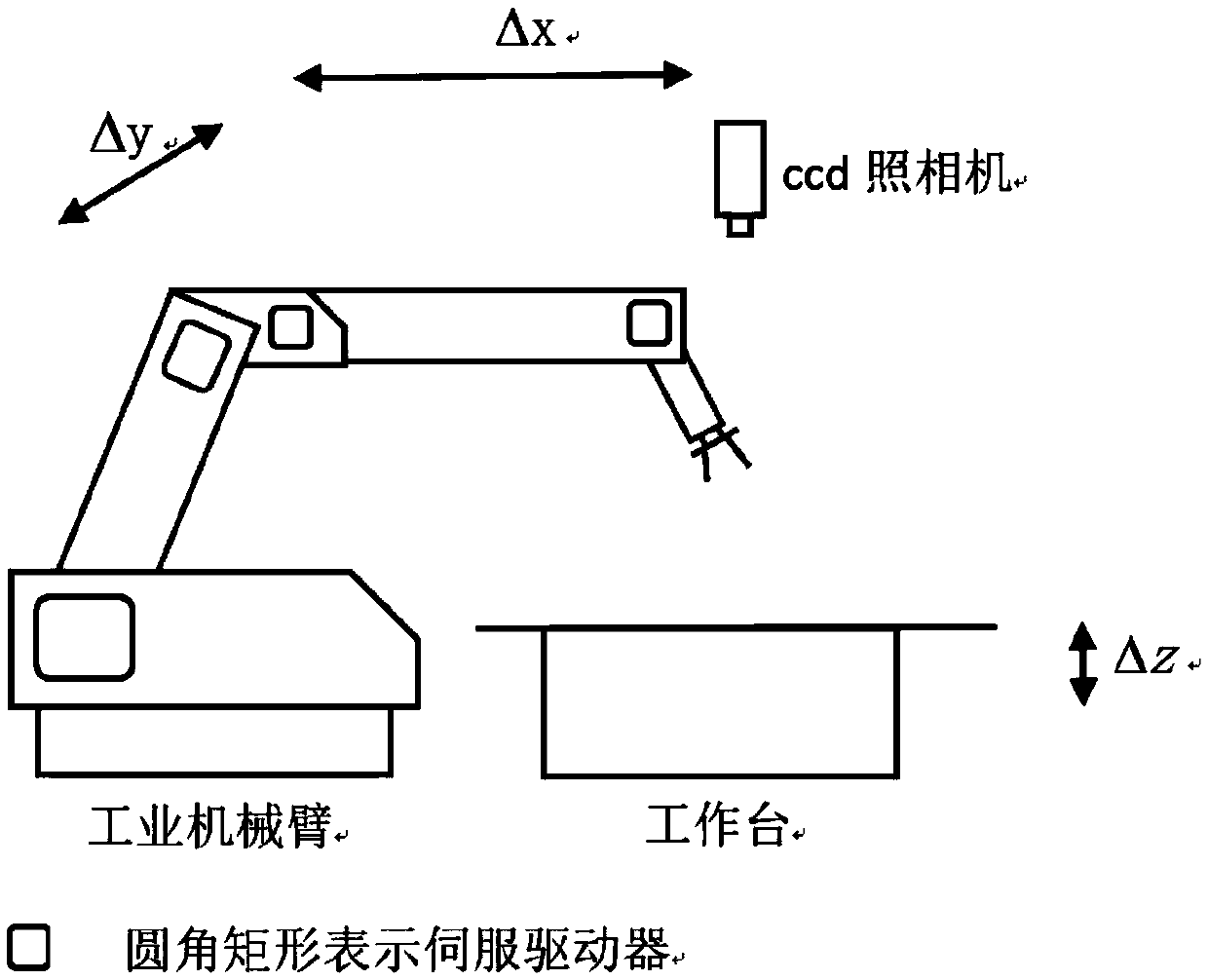
[0062] Place the target object on the workbench, use the CCD camera to collect the color information pictures of the target object on the workbench in different postures, different positions, and different directions, and manually mark the ideal grasping pose points. The purpose is to fully obtain the visual information representation of the target object and mark the ideal grasping position, so as to fully represent the actual distribution of the target object in various situations. There can be many kinds of target objects, such a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More