

Robot 3D repeated positioning precision test system
A repeat positioning accuracy and testing system technology, applied in the direction of instruments, measuring devices, optical devices, etc., can solve problems such as test speed drop, large positioning measurement error, and different surface accuracy cannot be guaranteed to be consistent, so as to improve stability and reduce The effect of overall weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following Example.
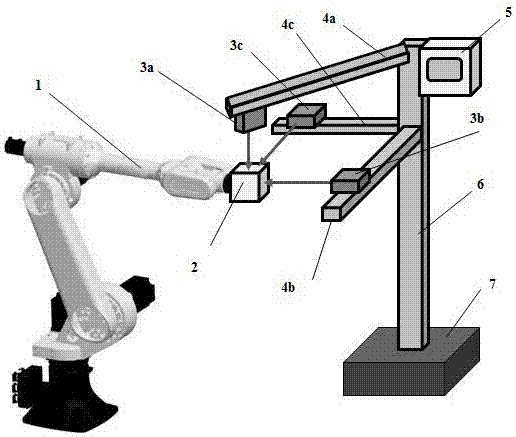
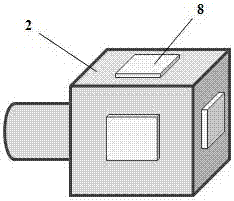
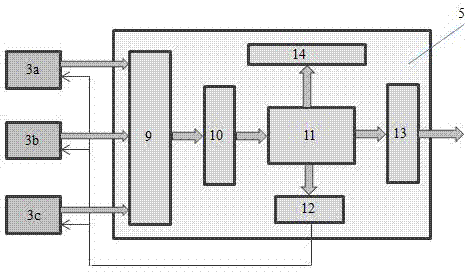
[0041] The present invention proposes a robot three-dimensional repetitive positioning accuracy test system based on a laser displacement sensor and a synchronous controller, such as figure 1 shown. The system includes: a reflector 2, a sensor 3, a bracket 4, a controller 5, a column 6, a base 7, etc., wherein: the sensor 3 has three 3a, 3b, 3c, which are respectively fixed on the three brackets 4a, Above 4b and 4c; the three sensors are arranged in pairs of 3a, 3b and 3c in orthogonal directions, and the three laser beams are projected to the reflector 1 at the same time.
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More