

Improved fast steering mirror (FSM) inertial stability control method based on strapdown acceleration measurement
An acceleration measurement and inertial stabilization technology, applied in the field of fast mirror inertial stabilization control based on strapdown acceleration measurement, can solve the problems of low sampling rate, large delay characteristics, insufficient disturbance suppression capability, and improved system type, etc. Achieve the effect of improving feedforward control accuracy, ensuring disturbance feedforward capability, and high disturbance data accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The specific embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
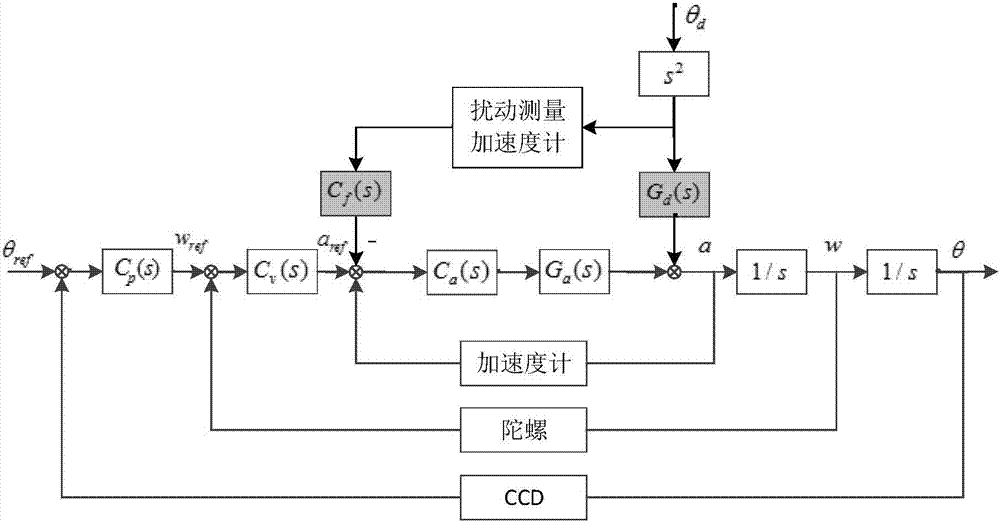
[0027] As attached figure 1 Shown is the control block diagram of the present invention, which includes the traditional three closed-loop control, including acceleration loop, speed loop, CCD position loop; and then is the disturbance feedforward loop based on measurement, the use of feedforward controller can directly measure the disturbance It is converted into feedforward quantity for compensation, thereby improving the disturbance suppression capability of the system. The feedforward node is selected at the acceleration loop setting and the output of the speed controller, and the acceleration controller is used cleverly to partially compensate the secondary differential in the controlled object, which avoids the occurrence of double integral in the feedforward controller and the system saturation. The specific implementation steps of using ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More