A Three Degrees of Freedom Parallel Mechanism with Arc Moving Pair
A technology of degrees of freedom and moving pairs, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as accompanying actions in the operation process, complex mechanism structure, and difficulty in controlling control accuracy, achieving high flexibility, simple motion forms, Guaranteed precision and quality results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
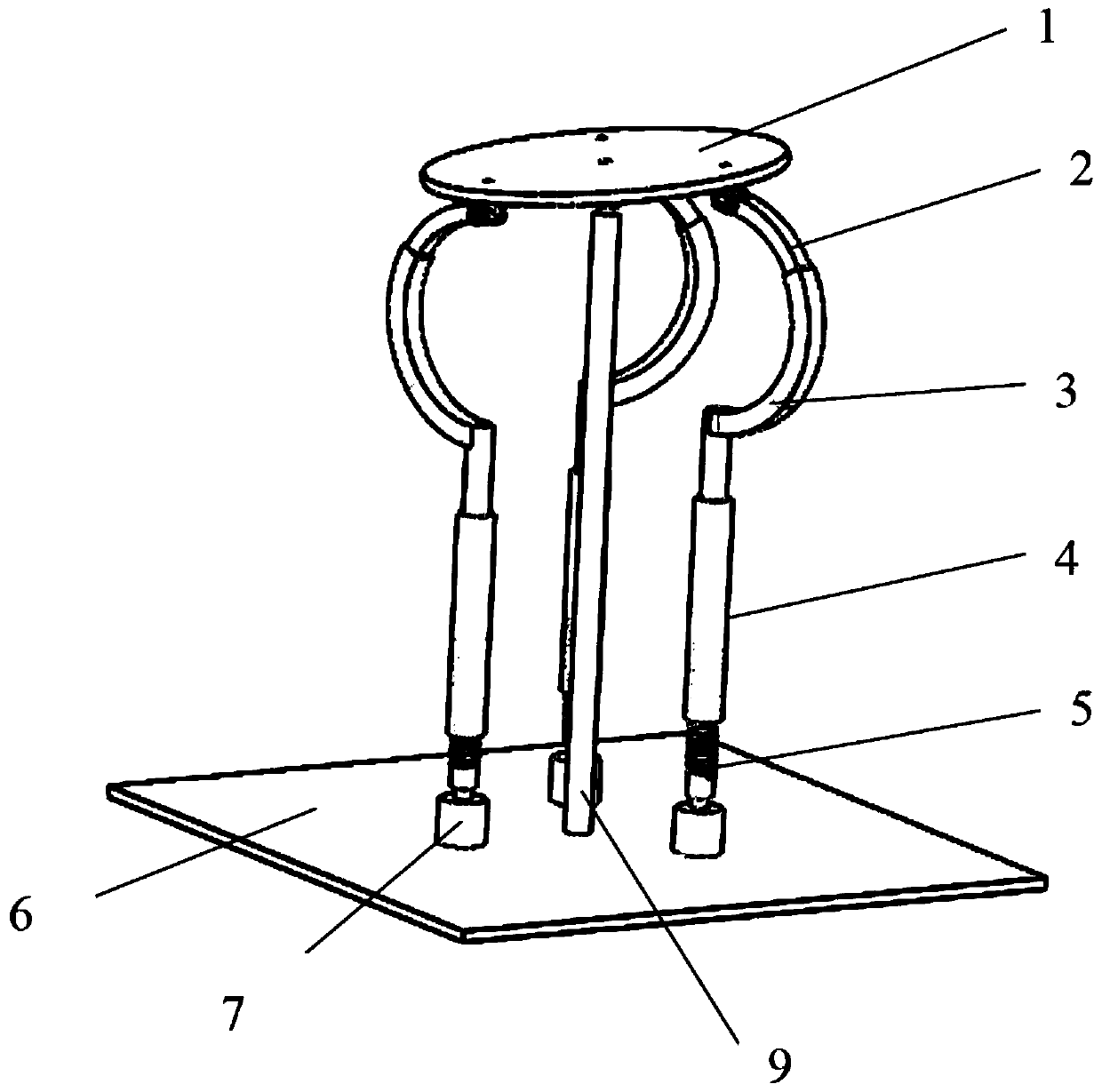
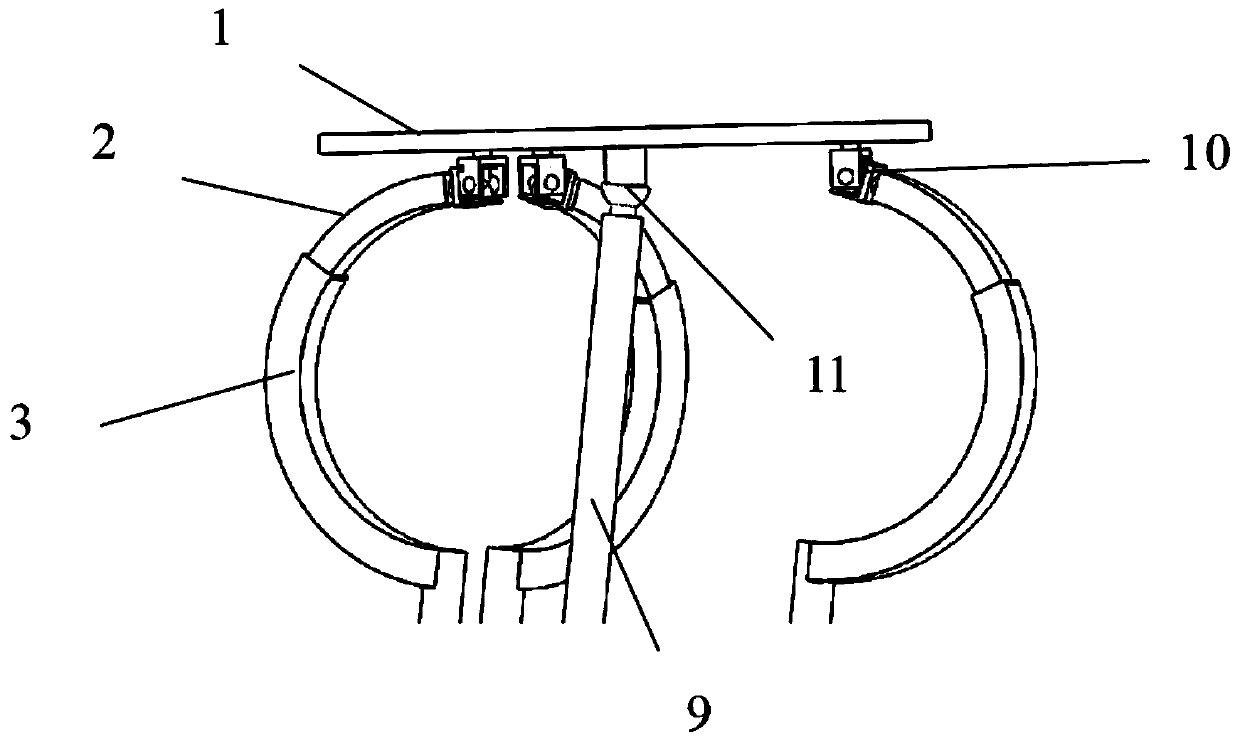
[0023] Please refer to figure 1 and figure 2 , the three-degree-of-freedom parallel mechanism with arc-shaped moving pairs in the present invention includes a base 6, a moving platform 1, a constraint rod 9 and three identical kinematic branch chains (not shown).
[0024] The restraining rod 9 connects the moving platform 1 and the base 6 , and the restraining rod 9 and the base 6 are fixedly arranged. The moving platform 1 has three degrees of freedom in rotation directions relative to the restraining rod 9 . Specifically, the restraining rod 9 is in the shape of a strip, the bottom end of which is fixed on the base 6 and its extension direction is perpendicular to the base plane of the base 6 , and the top end is connected with the moving platform 1 by a ball joint 11 .
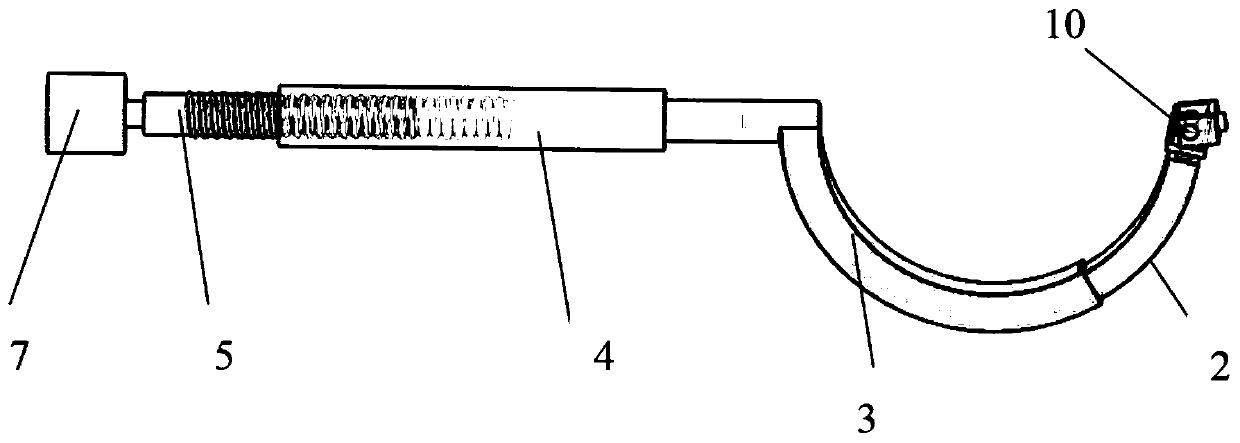
[0025] The three kinematic branch chains are arranged symmetrically with the constraint rod 9 as the center. The meaning of central symmetry is: the distance between the fixed point of each kinematic bra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com