

Anti-machine-impacting method and device for sixth-shaft movement gripper of robot
A robot and anti-collision machine technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of high maintenance cost, accumulation of error time and return journey, and large control information error, so as to improve safety, reduce The effect of small deformation and reduced maintenance cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with the examples, but not as a basis for limiting the present invention.
[0027] Example. The method for grabbing the anti-collision machine with the 6th axis movement of the robot comprises the following steps:
[0028] a. Use the current sensor to monitor the current variation relationship of each axis motor of the 6-axis robot in the normal working process, and obtain A data;
[0029] b. Through sparse learning, record the current information of each axis motor of the 6-axis robot at the maximum load and working limit position, and obtain B data;
[0030] c. It will be transformed into robot current analysis expert database data;
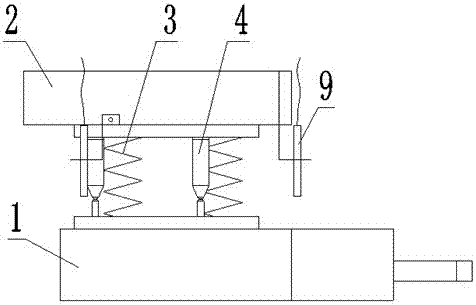
[0031] d. Install a precision position sensor at the grip of the 6th axis of the 6-axis robot to monitor the grip position, and output an alarm signal when the grip position is deformed;
[0032] e. Use the on-site measurement and control computer to control the info...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Length | aaaaa | aaaaa |
| Diameter | aaaaa | aaaaa |
| Length | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More