Amphibious quadrotor unmanned aerial vehicle
A four-rotor UAV and frame technology, applied in the field of flight, can solve the problems of insufficient power, high resistance, and the inability to adjust the UAV's floating and sinking at any time, and achieve the effect of saving space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The amphibious quadrotor unmanned aerial vehicle of the present invention will be described in further detail below with reference to the accompanying drawings and specific embodiments.
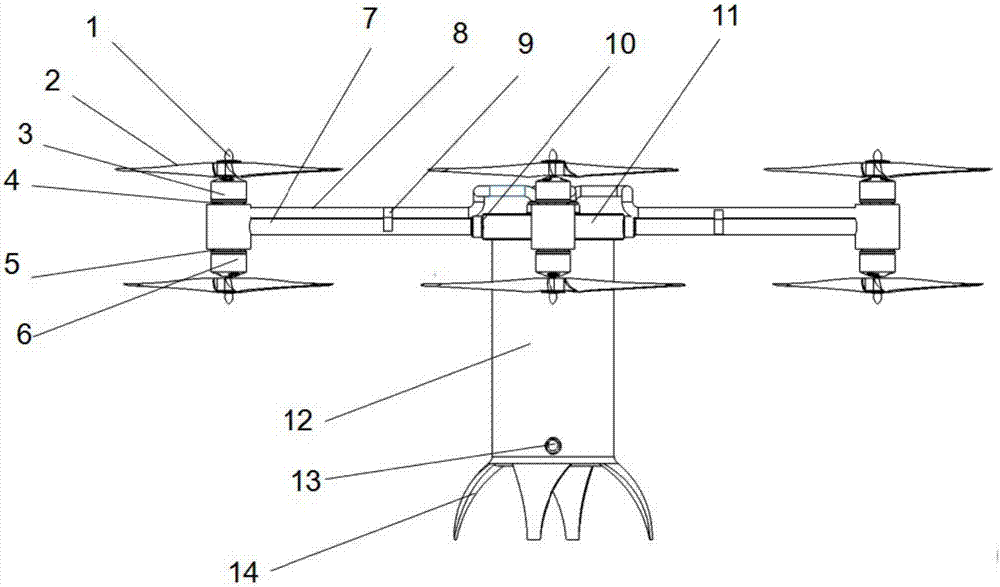
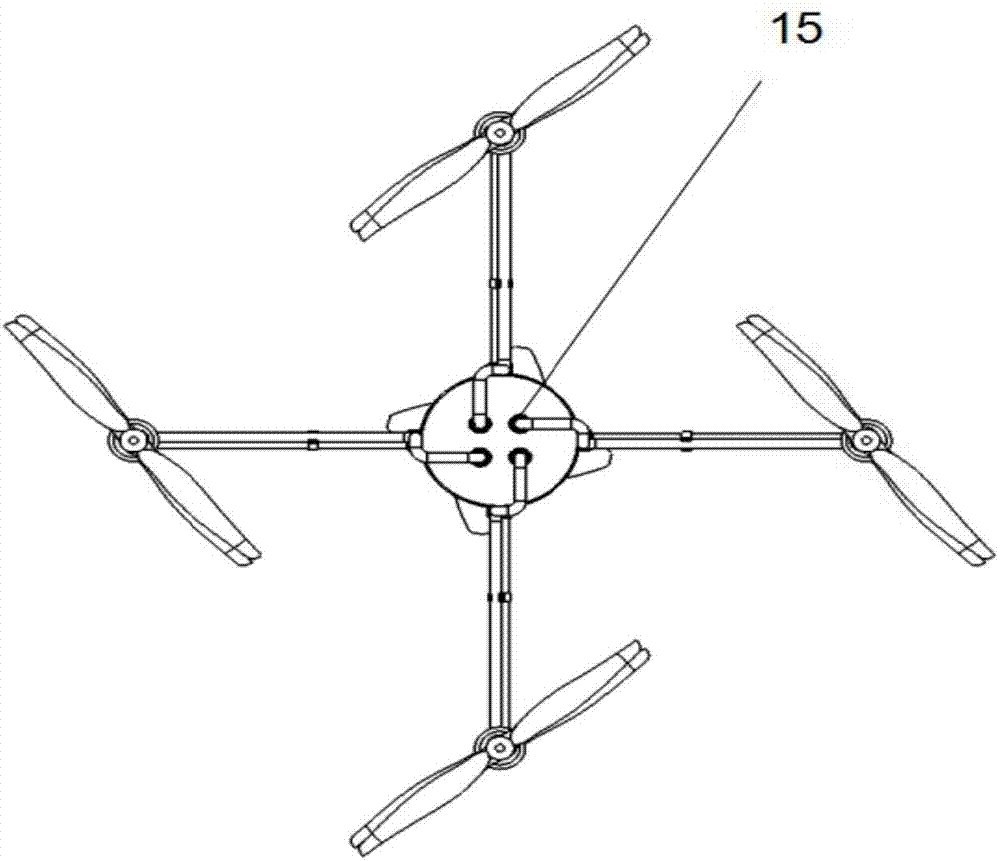
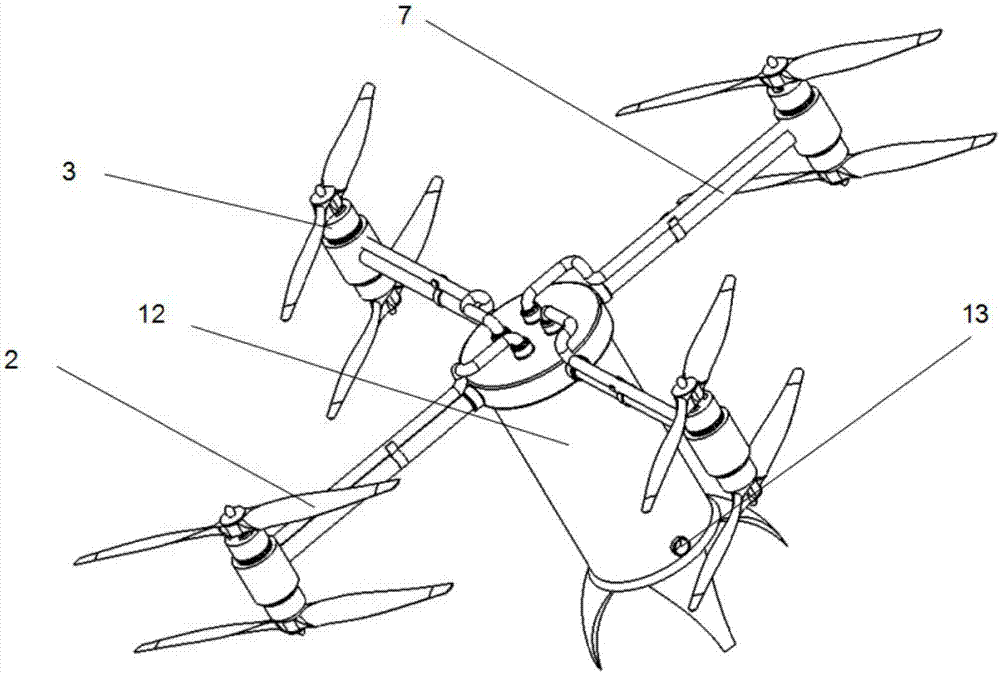
[0032] like figure 1 , figure 2 , image 3 As shown, an amphibious quadrotor UAV includes four propellers 2, a rigid cross bracket mechanism and a control system. The cross bracket mechanism includes a frame body 11 and four arms 7 connected around the frame body 11. The frame main body 11 is provided with an arm interface 10 for connecting the arm 7 around the frame main body 11 , a cabin body 12 is sealed under the frame main body 11 , and a watertight joint 15 for connecting the waterproof wire 8 is arranged on the top. A support foot 14 is installed at the lower end of the cabin body 12 , and a wire clip 9 for fixing the waterproof wire 8 is installed on the machine arm 7 along the machine arm.
[0033] The end of the machine arm is provided with an upper motor base 4 and a lo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com