

Self-balance vehicle obstacle avoidance method
A self-balancing vehicle and obstacle avoidance technology, which is applied to motor vehicles, vehicle position/route/height control, non-electric variable control, etc., can solve the problem of long reaction time, improve the safety of use, and improve the reaction time of obstacle avoidance Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
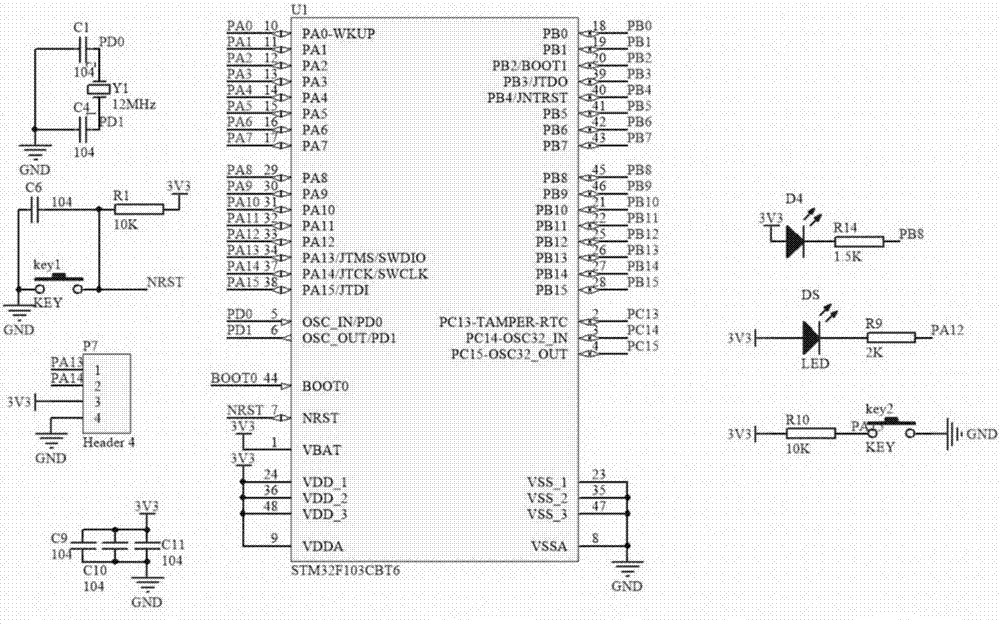
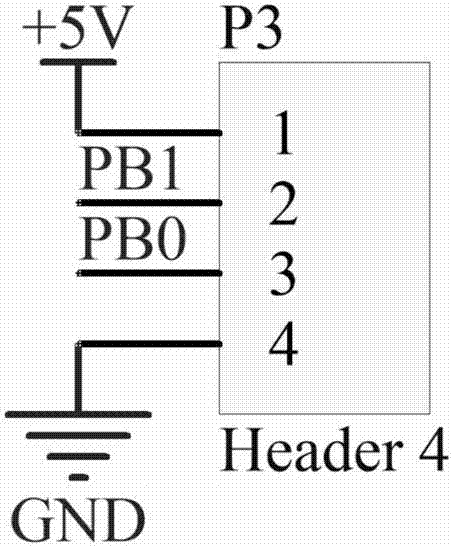
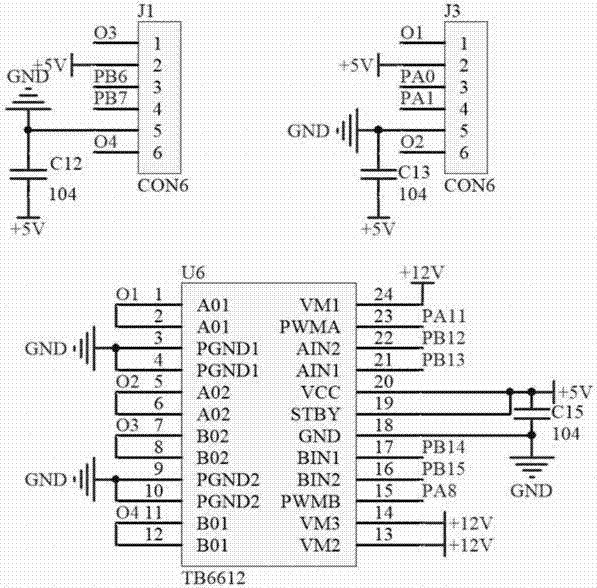
[0040] see figure 1 , Embodiment 1 provides a control system for an obstacle-avoidable self-balancing vehicle, including a microcontroller, an acceleration sensor connected to the microcontroller, an ultrasonic ranging sensor, and a motor drive module;
[0041] The acceleration sensor is used to measure the acceleration of the vehicle body, and transmit the acceleration data of the vehicle body to the microcontroller, and the microcontroller calculates a balance parameter according to the acceleration data of the vehicle body, and drives the motor according to the balance parameter The module sends a driving signal;
[0042] The driving signal drives the left and right wheel motors of the self-balancing vehicle to realize the upright, traveling and steering movements of the self-balancing vehicle;
[0043] The ultrasonic ranging sensor is used to measure the separation distance between the vehicle body and the obstacle, and transmit the separation distance to the microcontrol...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More