

Multi-unmanned aerial vehicle complex task planning method
A complex task and multi-UAV technology, applied in the field of complex task planning, to achieve the effect of flexible planning, simple principle and strong practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
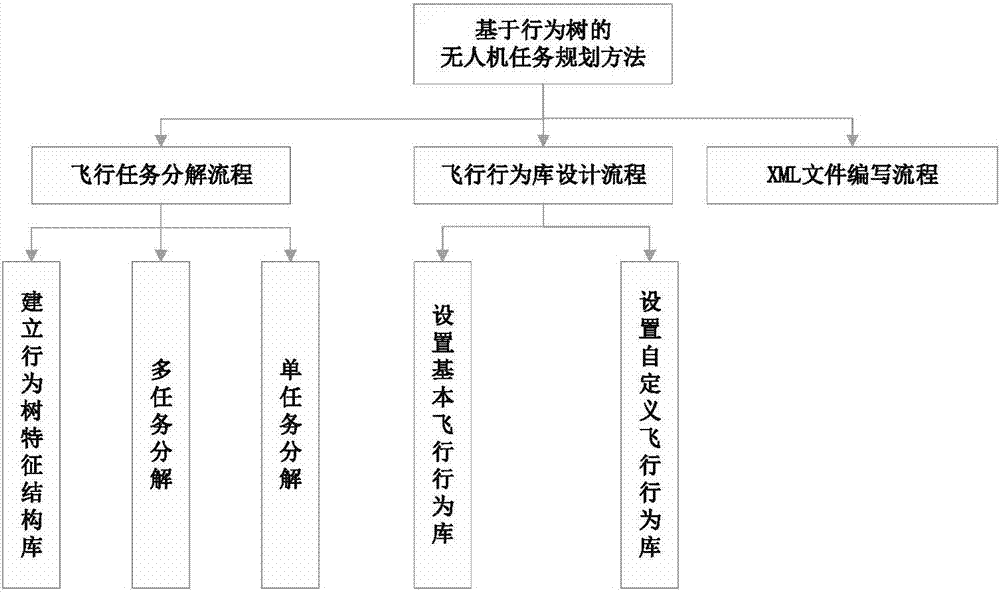
[0037] Such as figure 1 As shown, the present invention includes two parts, the flight task decomposition process and the flight behavior library design process. Among them, the flight task decomposition process is the first link. For a single or multiple tasks performed by a single UAV or multiple UAVs, a structural feature library (root node, combination node, and leaf node) of the behavior tree is established. , decompose and execute the tasks according to the corresponding logical relationship. The flight behavior library design process is the second link. According to the flight behavior of the UAV required by the mission, set up a basic behavior library containing basic flight behaviors, and set up a custom flight behavior library containing special missions. The process of writing XML files is the third link. The behavior tree structure obtai...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More