

Central driving lower extremity exoskeleton robot
An exoskeleton robot and central drive technology, applied in the field of robotics, can solve the problems of difficulty in adaptive adjustment of the size of the exoskeleton, no assistance, complex and bulky structure, etc., and achieve precise and convenient length adjustment, reduce motor load, and simple transmission structure. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be described in detail below in conjunction with the accompanying drawings.
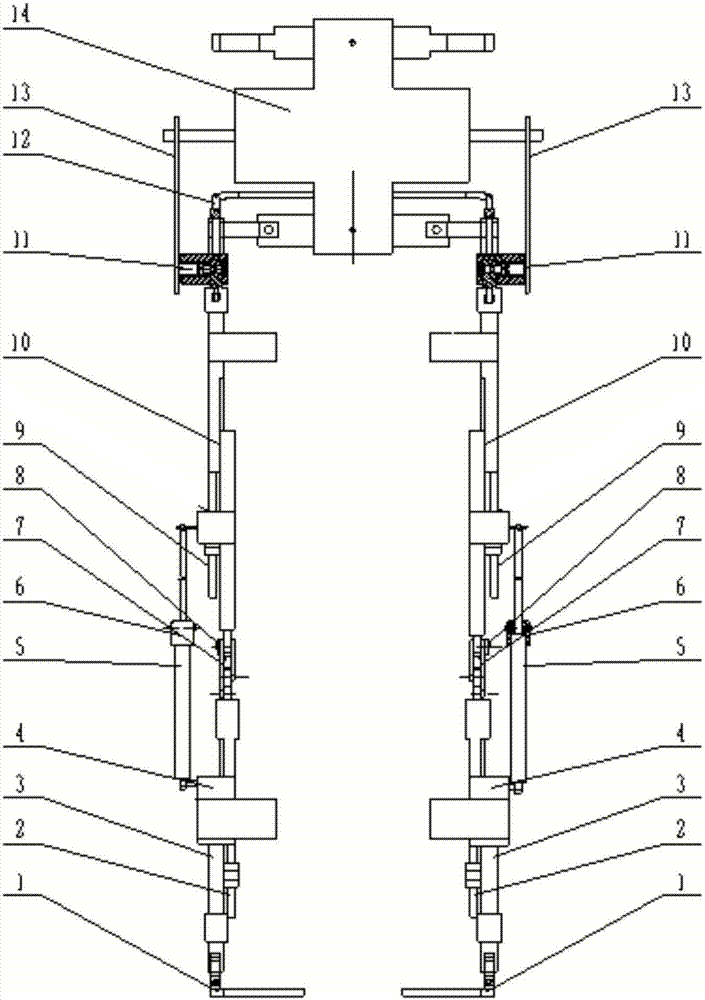
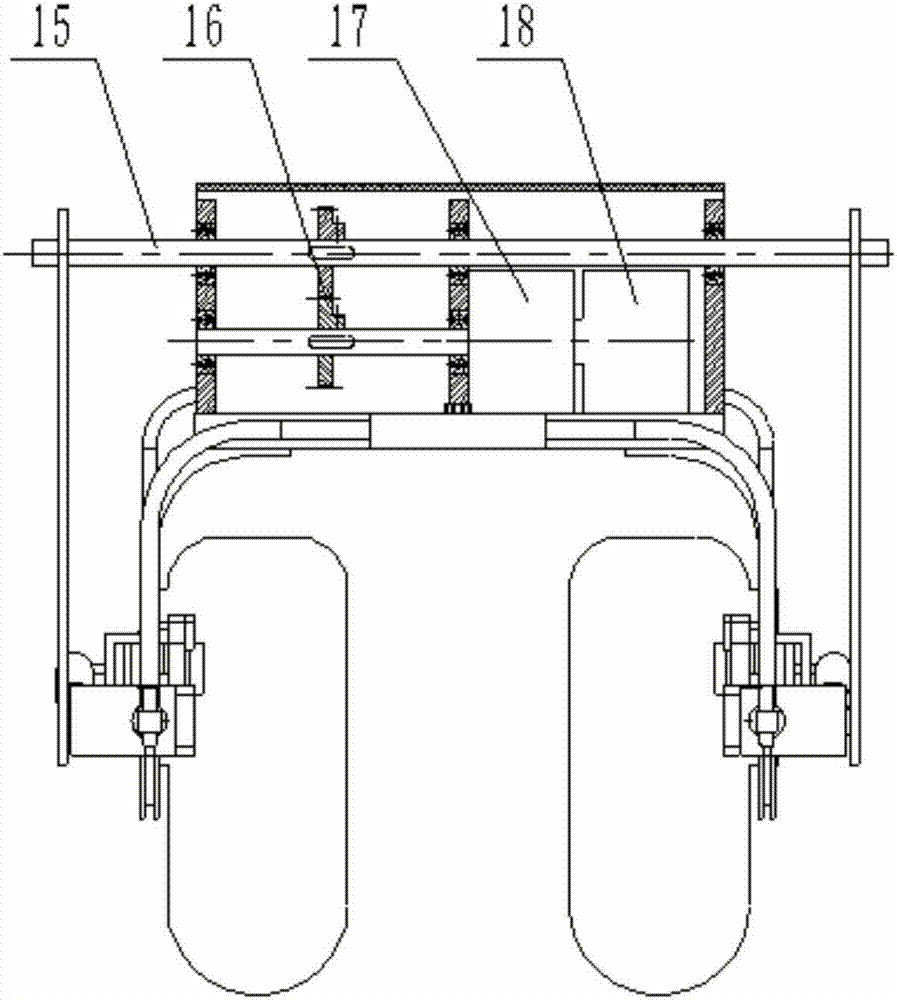
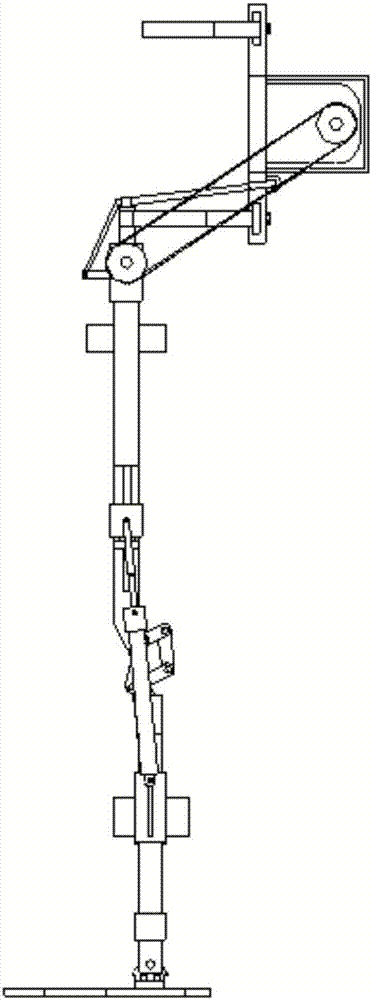
[0024] Such as Figure 1 to Figure 7 As shown, a centrally driven lower limb power-assisted exoskeleton structure provided by the present invention includes a back assembly 14 , a thigh assembly 10 , a calf assembly 3 , and a foot assembly 1 . A motor 18, a reducer 17, a gear set 16 and an output shaft 15 are installed in the back assembly 14. The motor 18 is connected to the output shaft 15 through the reducer 17 and the gear set 16, and the two ends of the output shaft 15 are respectively connected by a timing belt assembly 13. The spline assembly 11 on the left and right legs, the spline assembly 11 connects the thigh assembly 10, and the motor 18 transmits the torque to the hip through the reducer 17, the gear 16, the output shaft 15, the timing belt assembly 13 and the spline assembly 11 joint, so as to realize that a motor 18 provides assist torque for the lef...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More