

S-shaped joint for surgical robot, surgical instrument and endoscope
A surgical robot and joint technology, applied in the field of medical equipment, can solve the problems of limited transmission wire distribution, low precision, poor bearing capacity, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
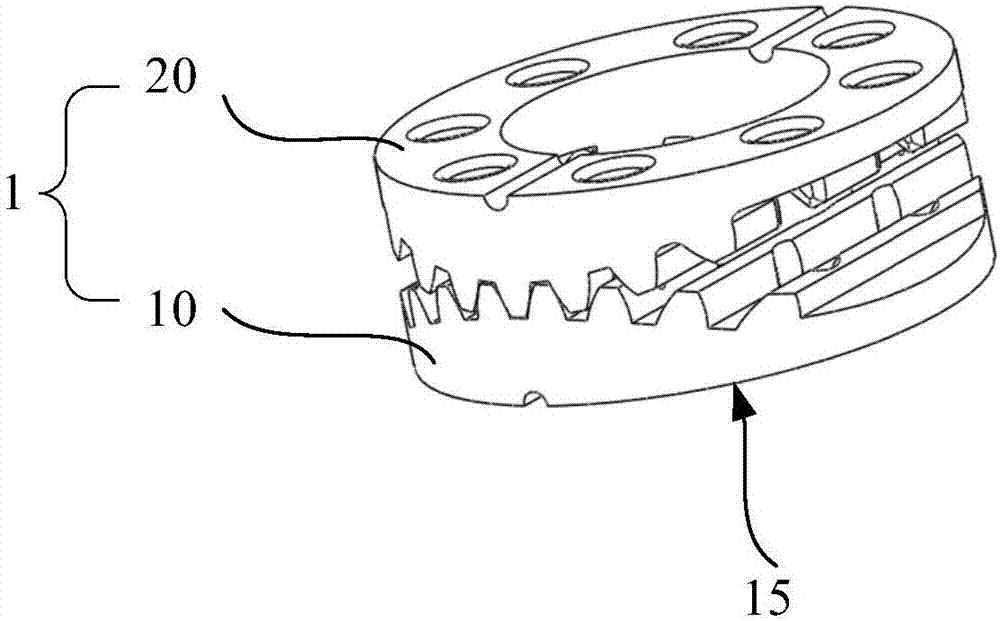
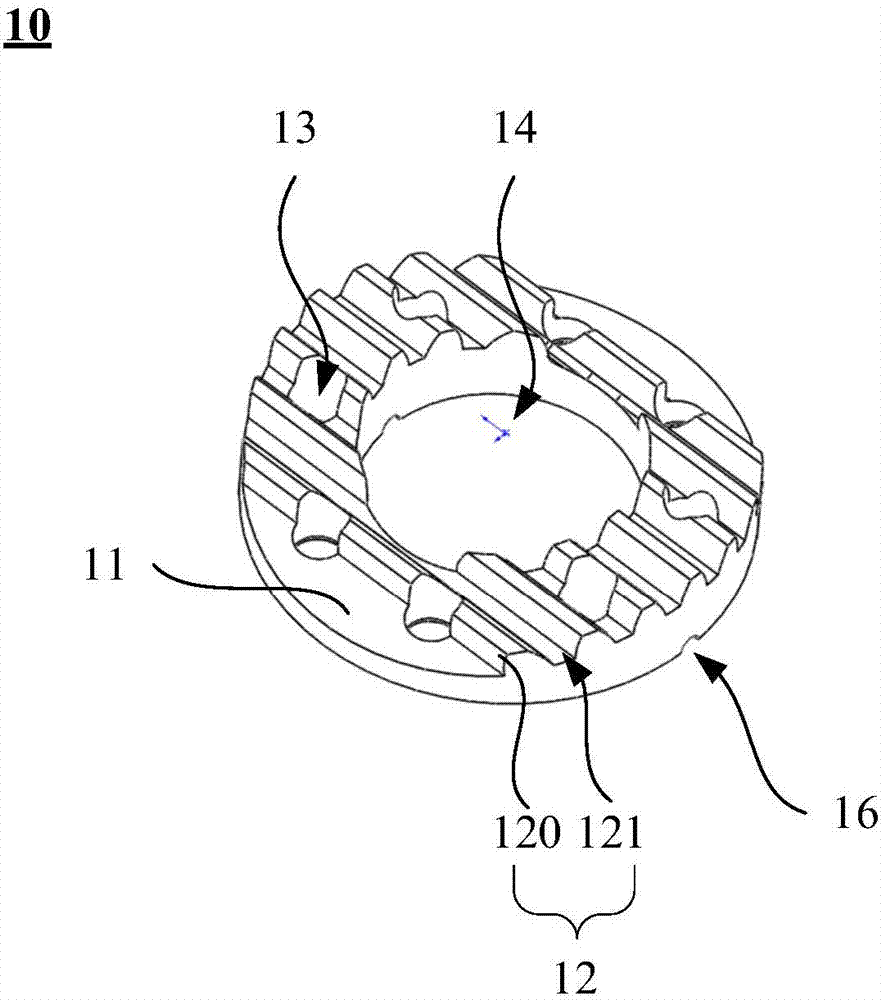
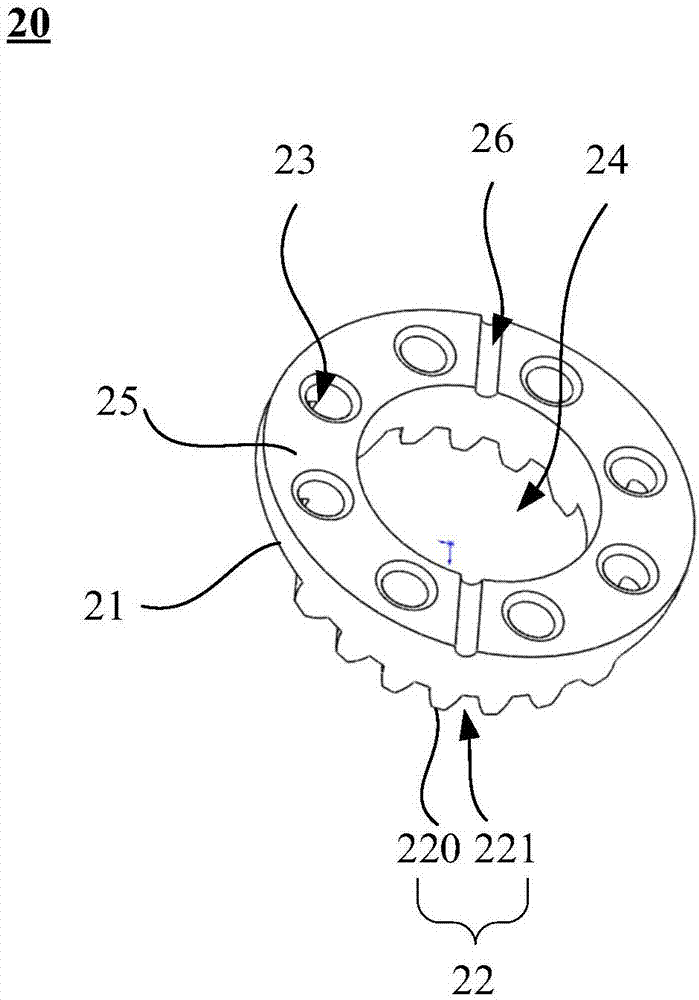
[0044] In the embodiment of the present application, the serpentine joint used in the surgical robot has one degree of freedom, including a joint joint pair and a flexible structure. First, please refer to Figure 1 to Figure 3 ,in, figure 1 It is a schematic structural diagram of the joint joint pair of the serpentine joint for the surgical robot according to the embodiment of the present invention; figure 2 It is a schematic structural diagram of the first articulation joint according to the embodiment of the present invention; image 3 It is a structural schematic diagram of the second articulation joint according to the embodiment of the present invention. Such as Figure 1 to Figure 3 As shown, each joint joint pair 1 includes a first joint joint 10 at the lower end and a second joint joint 20 at the upper end, the first joint joint 10 includes a first spherical surface 11, and the first spherical surface 11 is provided with The first engaging mechanism 12, the secon...
Embodiment 2
[0053] In this embodiment, the serpentine joint for the surgical robot has one degree of freedom, including two joint joint pairs and a flexible structure. Please refer to Figure 4 , which is a schematic structural diagram of a pair of joint joints of a serpentine joint for a surgical robot according to an embodiment of the present invention. Such as Figure 4As shown, the number of joint joints is two, that is, the first joint joint 1a and the second joint joint 1b, and each joint joint is configured as in the first embodiment. Further, in this embodiment, the extension direction of the second teeth of the first joint joint pair 1a is parallel to the extension direction of the first teeth of the adjacent second joint joint pair 1b. In this embodiment, the first pair of joint joints 1a and the second pair of joint joints 1b have the same swing direction, thus, the serpentine joint for surgical robot has only one degree of freedom, but can achieve a larger swing angle. Wher...
Embodiment 3
[0059] In this embodiment, the serpentine joint for the surgical robot has two degrees of freedom, including two pairs of joint joints and a flexible structure. Please refer to Figure 6 , which is a schematic structural diagram of a pair of joint joints of a serpentine joint for a surgical robot according to an embodiment of the present invention. Such as Figure 6 As shown, the number of joint joints is two, that is, the first joint joint 1a and the second joint joint 1b, and each joint joint is configured as in the first embodiment. Here, the extending direction of the second teeth of the first joint joint pair 1a is different from the extending direction of the first teeth of the adjacent second joint joint pair 1b. Specifically, the extension direction of the second teeth of the first joint joint pair 1a is perpendicular to the extension direction of the first teeth of the adjacent second joint joint pair 1b (ie, the included angle is 90°). The two articulated joint pa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More