Spot-welding mechanical arm for multi-rod closed chain structure
A technology of structural points and mechanical arms, which is applied in the directions of manipulators, program-controlled manipulators, welding equipment, etc., can solve the problems of large rotational inertia of manipulators, decreased dynamic performance, and small bearing capacity, and achieves high stiffness, no accumulated error, and bearing capacity. big effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
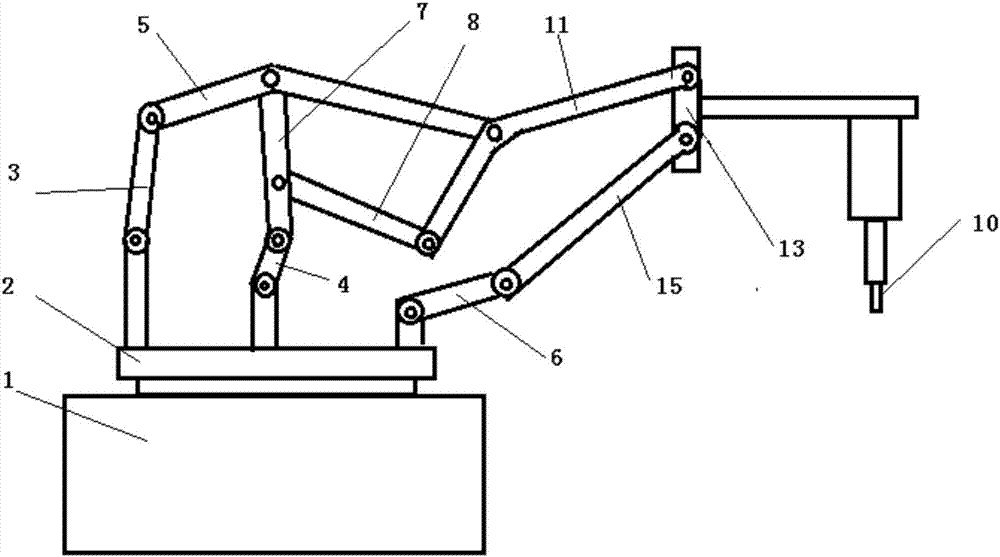
[0006] A multi-rod closed-chain structure spot welding mechanical arm, comprising: a base 1, a rotatable platform 2, a telescopic mechanism, a lifting mechanism, a pitch mechanism, a wrist 13, a welding torch 10 and a driving device; the telescopic mechanism includes a first active rod 3 and a large Arm 5; one end of the first active lever 3 is hinged to the rotatable platform 2, the boom 5 is curved, and one end of the boom 5 is hinged to the other end of the first active lever 3; the lifting mechanism includes: the second active lever 4 , the second connecting rod 7, the third connecting rod 8 and the elevating rod 11; one end of the second active rod 4 is hinged with the rotatable platform 1, and one end of the second connecting rod 7 is hinged with the other end of the second active rod 4. One end of the three connecting rods 8 is hinged to the middle part of the second connecting rod 7, the elevating rod 11 is curved, and one end of the elevating rod 11 is hinged to the ot...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap