

Spatial non-cooperation target autonomous visual line rendezvous no-model preset performance control method
A non-cooperative target and preset performance technology, which is applied in the field of model-free preset performance control of autonomous line-of-sight intersection of non-cooperative targets in space, can solve problems such as difficult to measure, difficult to meet online control, difficult to obtain ideal effects, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be described in further detail below in conjunction with the accompanying drawings.
[0051] For non-cooperative target rendezvous tasks, the simulation parameters of specific embodiments of the present invention are as follows:
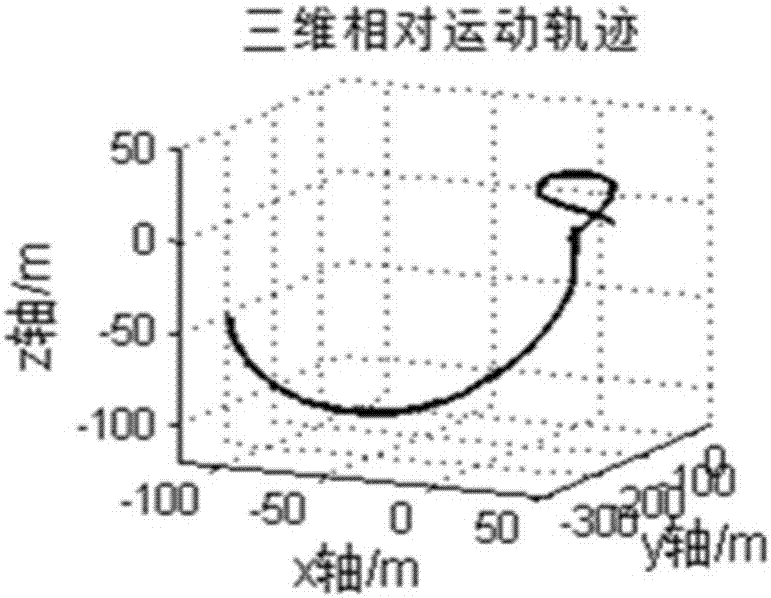
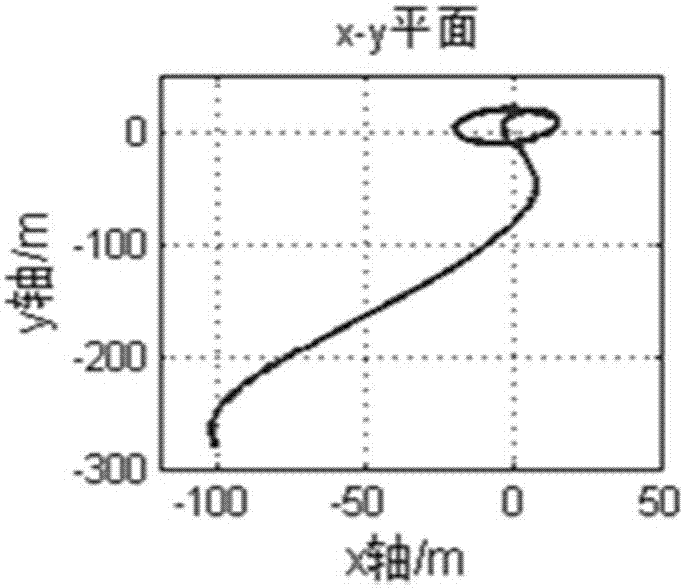
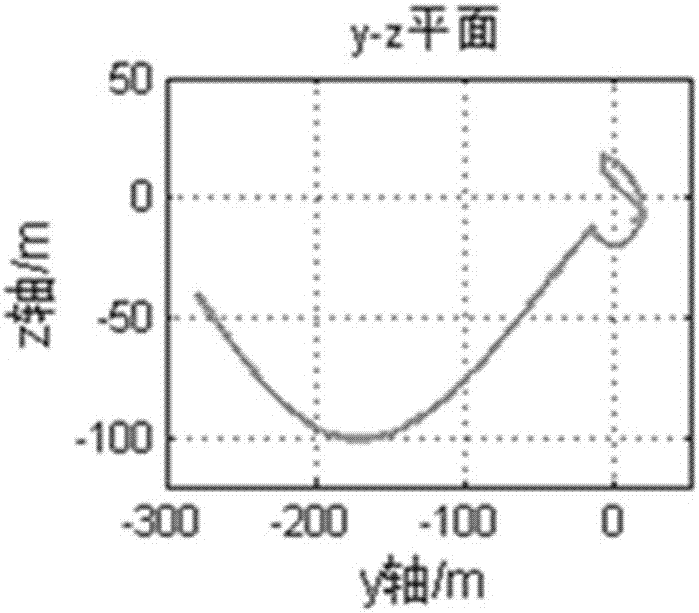
[0052] In terms of orbital initial conditions, the initial orbital element settings for tracking spacecraft and non-cooperative targets are shown in Table 1. The initial distance ρ(0) from the tracking spacecraft to the non-cooperative target is set to 0.3km, and the final relative distance is ρ f =0.02km, the direction of the non-cooperative target feature point is n b =[1,0,0] T , the maximum single-axis acceleration provided by the track control engine is 4.9N / kg.
[0053] Table 1 Initial track elements
[0054]
[0055] In terms of attitude initial conditions, the initial attitude of the tracking spacecraft is set to q(0)=[-0.33,-0.22,-0.22,0.89] T , the initial desired pose is set to q d (0)=[-0.31,-0.5...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More