

Multi-target route planning and united searching method of drone in urban low-altitude environment
A technology of path planning and unmanned aerial vehicles, which is applied to the control of finding targets, unmanned aircraft, motor vehicles, etc., can solve the problems of not using offline information, reducing flight time, etc., and achieve the goal of reducing storage capacity and computing performance Requirements, low computational complexity, cost reduction effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described below in conjunction with accompanying drawings and examples.
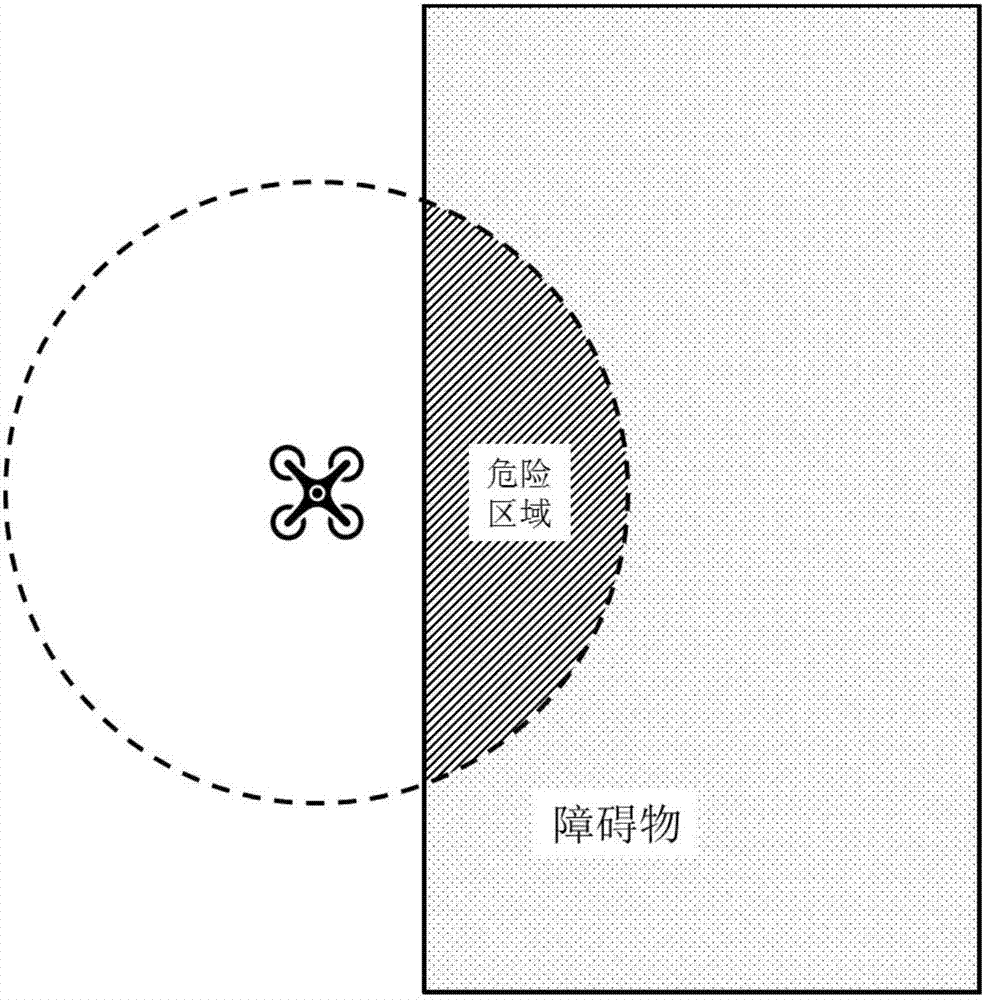
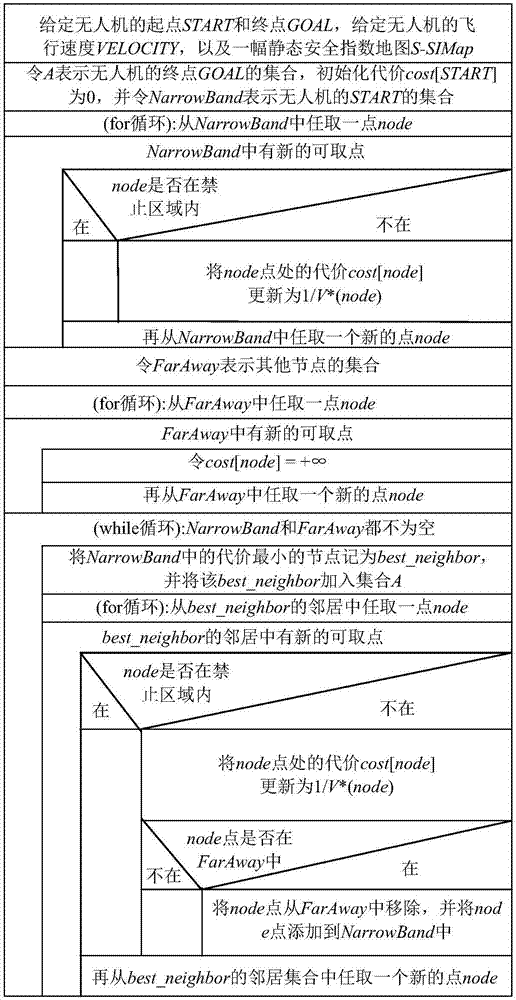
[0034] The multi-objective path planning problem to be solved by the present invention is: to find the Pareto optimal path for the unmanned aerial vehicle to fly over the dynamic urban low-altitude environment - which can not only ensure the safety of the unmanned aerial vehicle during flight, but also make the unmanned aerial vehicle Reach the destination in the shortest possible time. For this purpose, the present invention proposes two types of safety index maps, i.e. static safety index maps and dynamic safety index maps, which are marked with obstacles in geographic maps (such as Baidu maps) and UAVs during flight. Based on detected unmarked unknown obstacles. Based on this, the static cost distribution map and the dynamic cost distribution map are generated respectively, and a method based on the combination of offline search and online search based on ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More