

Electromagnetic insert gripper device
A gripper device and insert technology, applied in the directions of manipulators, program-controlled manipulators, chucks, etc., can solve the problems of low automation procedures and low efficiency, and achieve the effect of avoiding industrial accidents, improving efficiency and ensuring stability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, specific implementations will now be described in detail with reference to the accompanying drawings.
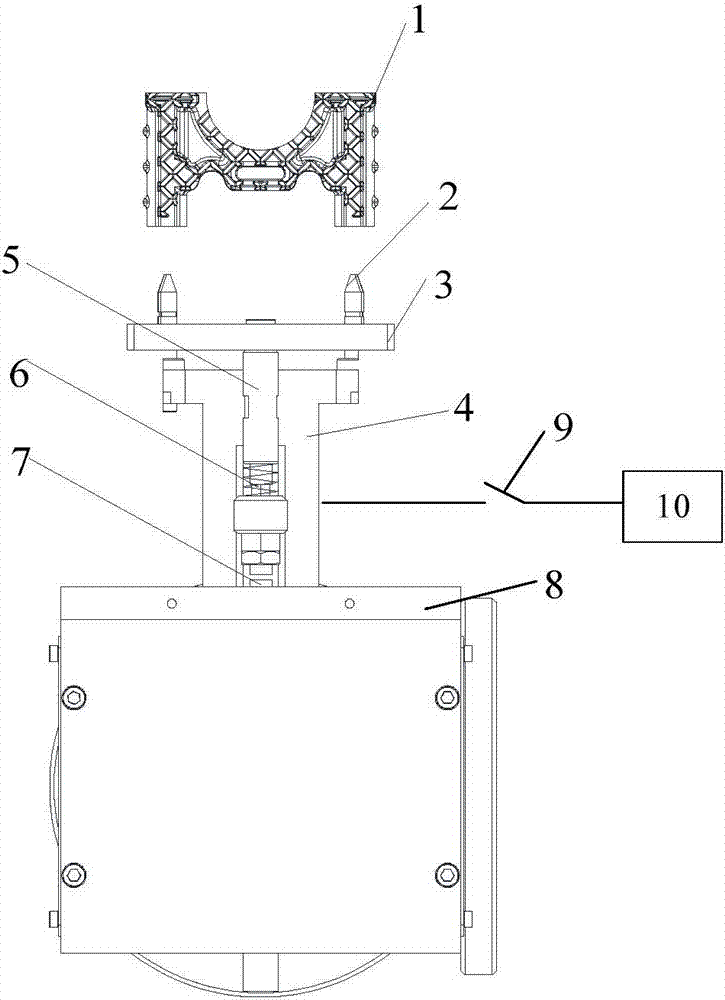
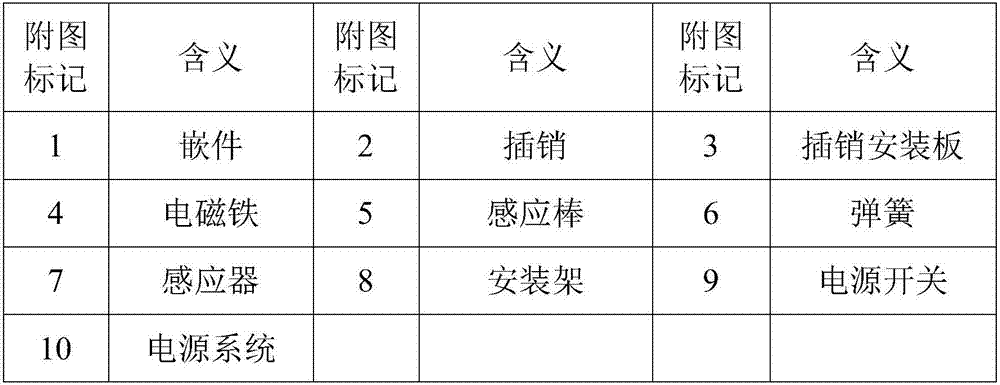
[0019] Such as figure 1 As shown, the electromagnetic insert gripper device includes a latch 2, an electromagnet 4, a latch mounting plate 3, and an induction rod 5. A plurality of latches 2 are distributed on the latch mounting plate 3, and the latch mounting plate 3 is carried on the electromagnetic through the induction rod 5. On the iron 4, the bottom end of the induction rod 5 is placed in the guide hole of the electromagnet 4 through the spring 6, the spring 6 is a cylindrical helical compression spring, the electromagnet 4 is fixed on the mounting frame 8, the electromagnet 4 is connected to the power switch 9, and the power supply The switch 9 is connected to the power system, the electromagnet 4 is a direct-acting electromagnet; the sensor 7 is i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More