

Intelligent road line drawing system based on unmanned aerial vehicle cooperation and method thereof
A technology of intelligent roads and drones, applied in the field of drones, can solve the problems of low spraying efficiency, waste of human and material resources, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
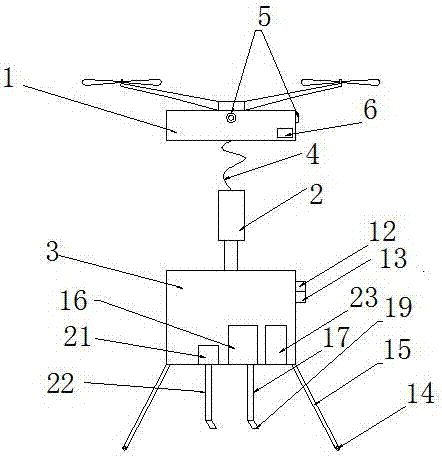
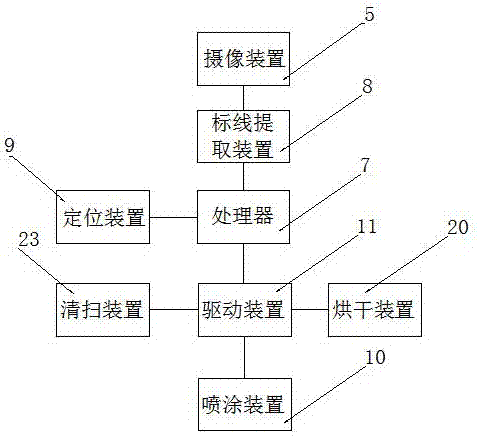
[0030] Such as figure 1 , image 3 As shown, an intelligent road line supplement system based on UAV cooperation includes a UAV 1, a connecting device 2, and a marking mechanism 3. The UAV 1 and the connecting device 2 are connected by an iron chain 4, The unmanned aerial vehicle 1 is provided with a camera 5 and a navigation device 6, and the marking mechanism 3 includes a processor 7, a marking extraction device 8, a positioning device 9, a spraying device 10, a driving device 11, and the processor 7 Connect with drone 1, navigation device 6, marking extraction device 8, positioning device 9, driving device 11, described camera device 5 is connected with marking extraction device 8, and described driving device 11 is connected with spraying device 10, drives The device 11 is used to drive the spraying device 10 to draw a line. The front of the marking mechanism 3 is provided with a laser rangefinder 12 and a radar speedometer 13. The laser rangefinder 12 and the radar speed...
Embodiment 2
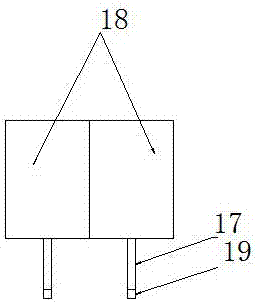
[0034] Such as figure 2 , image 3 As shown, the scribing mechanism 3 also includes a drying device 20, and the drying device 20 includes a dryer 21 and a drying spray pipe 22, and the dryer 21 is connected to the driving device 11, and the spraying device 10 After spraying, the driving device 11 drives the drying device 20 to dry the paint. The marking mechanism 3 also includes a cleaning device 23, which is a pop-up structure, and the cleaning device 23 is connected with the driving device 11 for cleaning the road surface. The processor 7 analyzes whether the road surface where the marking line is located is suitable for spraying according to the image of the received marking line. If it is analyzed that there is rubbish on the road surface, it outputs a cleaning signal to the driving device 11, and the driving device 11 drives the cleaning device 23 to pop up to clean the road surface. If there is accumulated water on the road surface, a drying signal is output to the dr...
Embodiment 3
[0039] Such as Figure 4 As shown, a laser rangefinder 12 and a radar speedometer 13 are arranged in front of the marking mechanism 3, and the laser rangefinder 12 and the radar speedometer 13 are connected to the processor 7, and the laser rangefinder 12 For detecting the distance between the obstacle ahead and the marking mechanism 3, the radar speedometer 13 is used for detecting the speed of the obstacle ahead, if the processor 7 judges that there is an obstacle coming in the received aerial picture, according to the laser The distance value transmitted from the rangefinder 12 and the speed value transmitted from the radar speedometer 13 calculate the time required for the obstacle in front to reach the position of the line replenishment mechanism, and set a preset safe time interval. When the calculated by the processor 7 When the time is within the safe time interval, a take-off signal is sent to the UAV 1, and a cover signal is output to the drive device 11 at the same ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More