A master-slave optimization method for multiple on-orbit missions
An optimization method and task technology, applied in the direction of instruments, adaptive control, control/regulation systems, etc., to achieve the effect of intuitive algorithm form, avoiding singularity, and high precision of optimization results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
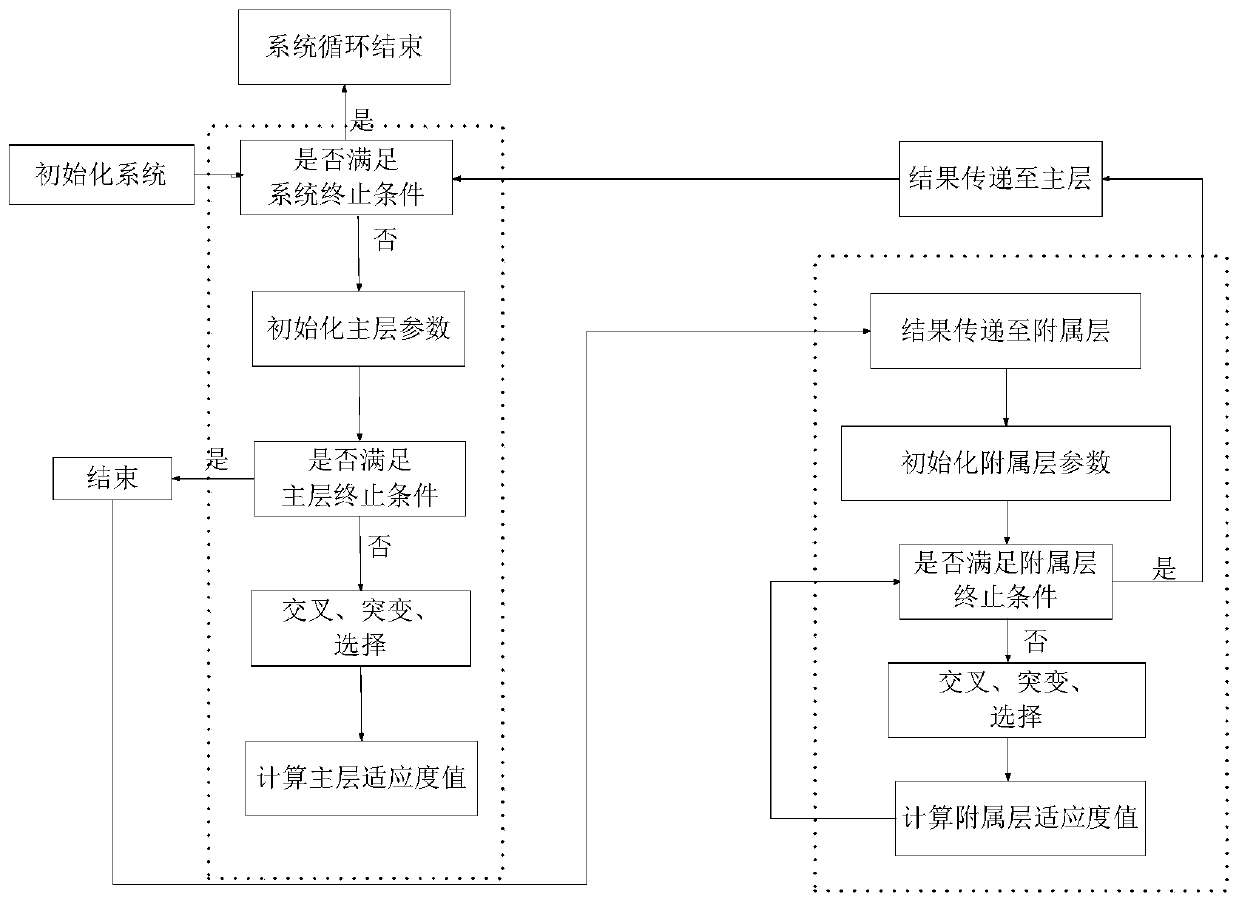
[0034] In order to achieve the purpose of saving orbital fuel and reducing space costs, considering the use of space robots to continuously perform multiple orbital tasks, this invention proposes a master-slave optimization method for multiple orbital tasks. Firstly, the main layer obtains the optimal sequence of waypoints based on the target requirements of this layer; secondly, the sublayer bases on the sequence of waypoints of the main layer and combines the target requirements of this layer (actual poses and expected poses at all waypoints The sum of the errors is zero) and the theoretical equation (kinematics equation of the space robot) to obtain the joint motion of the robot; finally, the subordinate layer transmits the optimization result to the main layer, and the main layer optimizes The point sequence is improved and passed to the subsidiary layer, and if the index requirements are met, the loop ends.
[0035] see figure 1 ,Specific steps are as follows:
[0036] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More