

Human skeleton point parameter acquisition device applied to humanoid motion mimicry and recognition method thereof
A technology of human body movement and human body, applied in character and pattern recognition, image data processing, instruments, etc., can solve the problems of low recognition accuracy and poor real-time performance, and achieve high recognition accuracy, strong real-time performance and strong robustness Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0009] The present invention is described in detail below in conjunction with the accompanying drawings and specific embodiments.
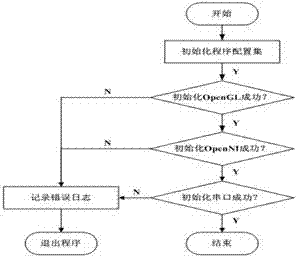
[0010] The embodiment of the present invention figure 1 Recognition program initialization flow chart. At the beginning of the establishment of the system, it first collects every point within the field of view and forms a depth image representing the surrounding environment. The sensor generates a stream of depth images at a rate of 30 frames per second to reproduce the surrounding environment in real time. Secondly, Kinect evaluates the depth-of-field image at the pixel level to identify different parts of the human body, uses a segmentation strategy to distinguish the human body from the background environment, and obtains the depth-of-field image after kicking out the background of the tracking object. Finally, Kinect evaluates every possible pixel of the Exemplar output to determine joint points, and generates a skeletal system map based on ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More