

High-precision rope driving device
A rope-driven, high-precision technology, applied in transmission devices, friction transmission devices, manufacturing tools, etc., can solve the problems of low control precision, affecting circuit layout, and high cost, so as to improve the accuracy of rope output and improve reconfigurability performance and improve control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
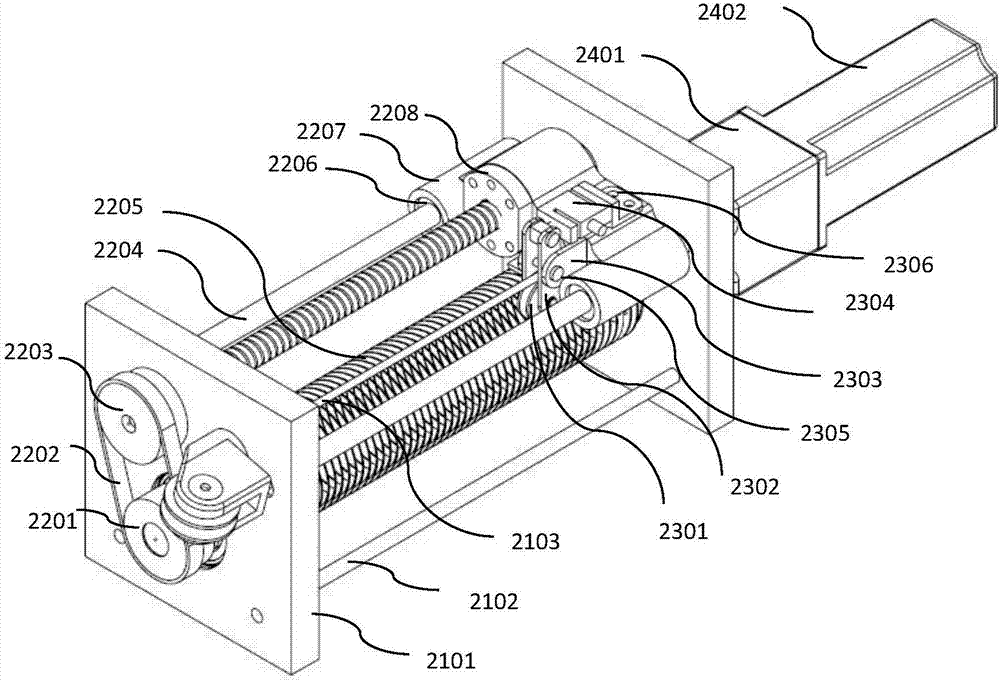
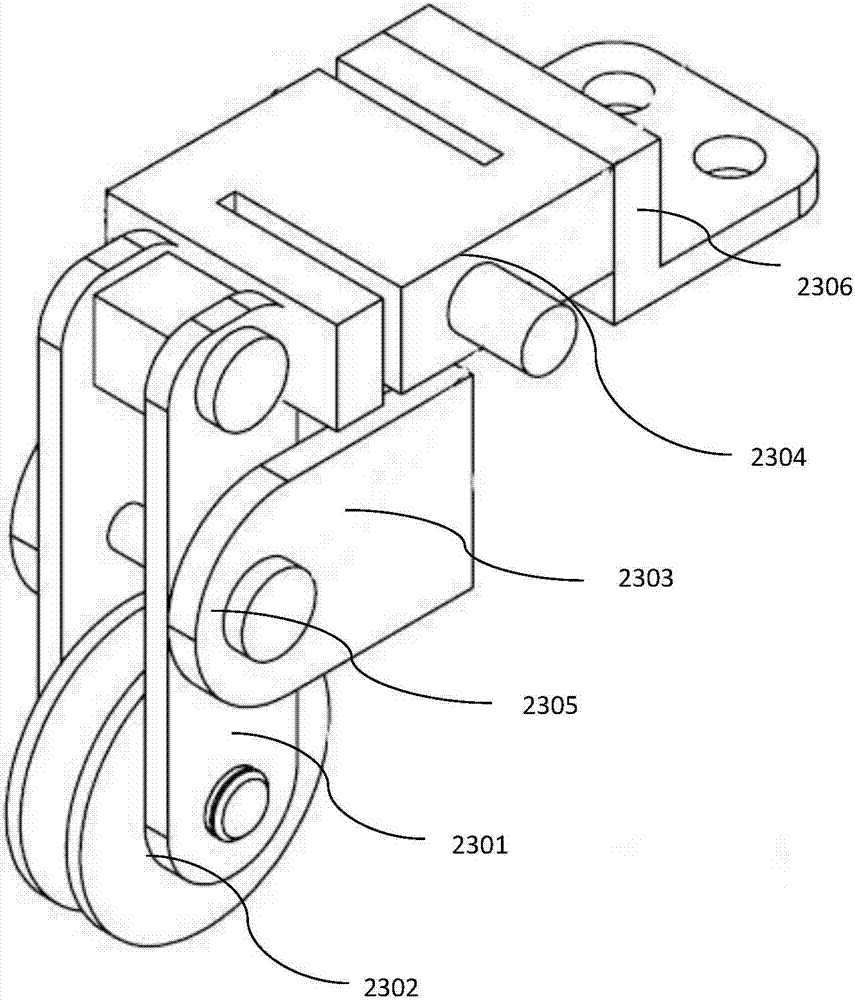
[0027] In this example, if figure 1 As shown, a rope drive device for a multi-configuration rope-driven parallel robot includes: a pair of main body brackets 2101, a pair of support rods 2102, ropes 2103, a rope guiding mechanism 2200, a universal export mechanism 2500, and a real-time tension measuring mechanism 2300 and a servo drive 2400;
[0028] The rope guiding mechanism 2200 includes: a pair of supporting optical shafts 2204, a grooved reel 2205, a driving screw 2208, a moving slide 2207, a linear bearing 2206, a timing belt 2202, a timing belt driven wheel 2203 and a timing belt driving wheel 2201; The supporting optical shaft 2204 and the driving screw 2208 have the function of load support, and can pull the moving slide 2207 to move in the horizontal direction; the number of supporting optical shaft 2204 and driving screw 2208 can be adjusted according to the actual task load requirements, or can Using a linear guide rail to replace the supporting optical axis 2204 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More