

Under-actuated mast crane positioning anti-swing nonlinear control method
A non-linear control, crane technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of dangerous energy, loss, inability to effectively control the crane, etc., to improve control performance and good control effect. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0150] 1. Description of experimental steps
[0151] Section 1.1. Define error signal, state vector and overshoot constraints
[0152] Define the pitch angle error of the crane boom e 1 And rotation angle error e 2 Respectively
[0153] e 1 =φ 1 -φ 1d ,e 2 =φ 2 -φ 2d
[0154] Where φ 1 ,φ 2 Respectively represent the pitch angle and rotation angle of the boom, φ 1d ,φ 2d Respectively represent the target value of the pitch and rotation angle of the boom; define the crane state vector as Where θ 1 ,θ 2 Are the swing angles of the load in the radial and tangential directions respectively; the symbol " ”Means matrix / vector transposition; define the maximum overshoot allowed by the boom in both the pitch and rotation directions as ζ 1 ,ζ 2 , Which requires φ 1 -φ 1d 1 ,φ 2 -φ 2d 2 .
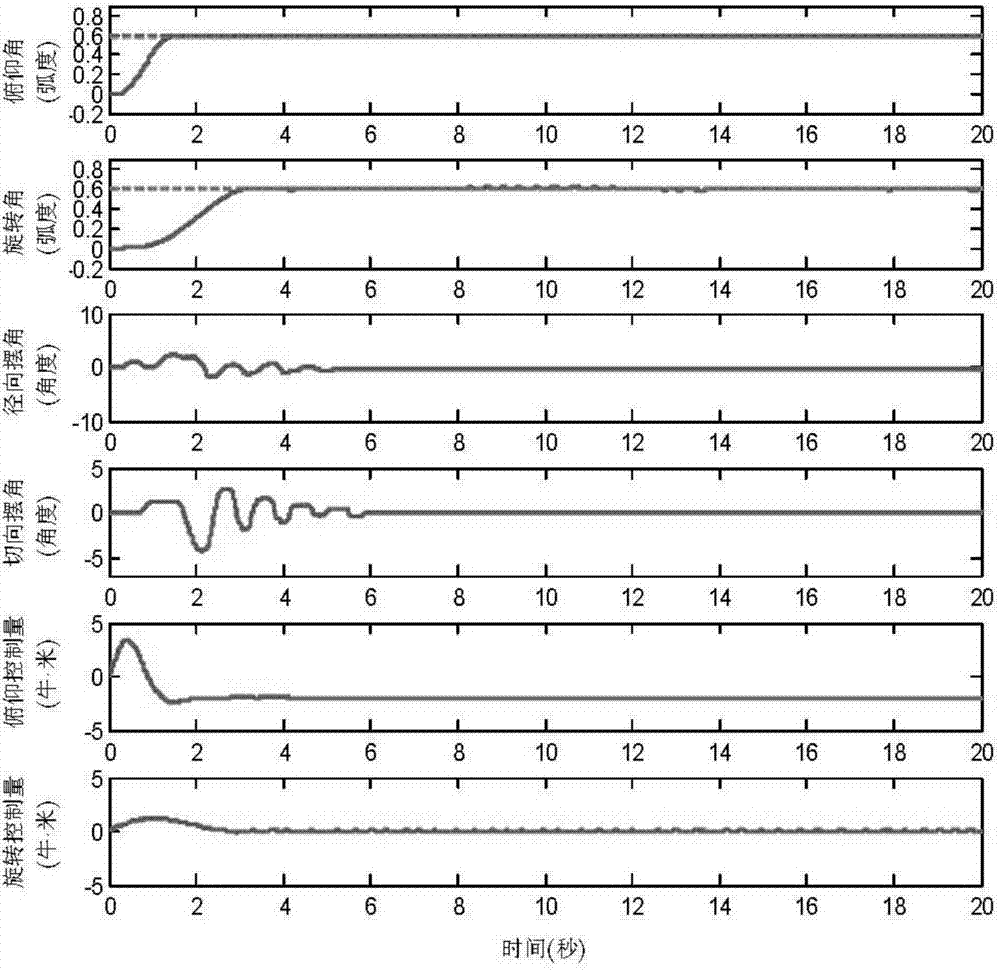
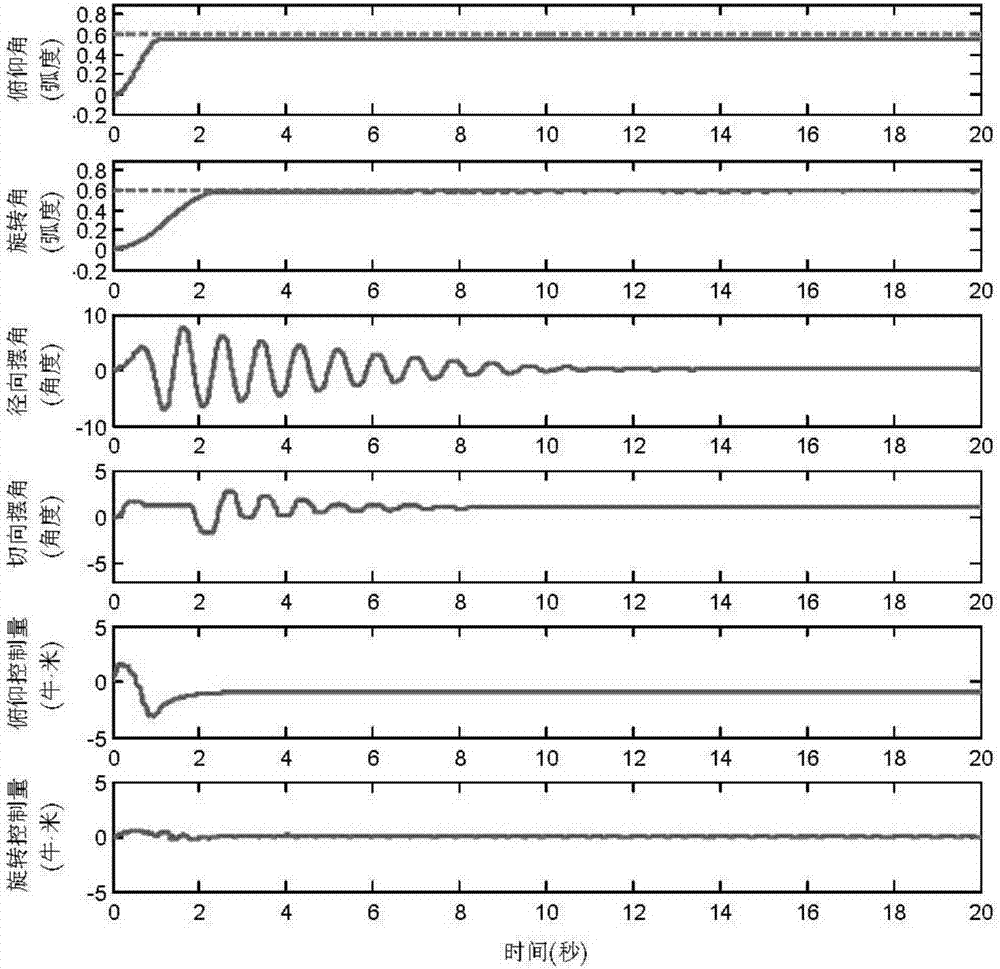
[0155] Section 1.2. Define control objectives
[0156] During the movement, the control target requires the boom pitch angle φ 1 And rotation angle φ 2 Reach the specified position and eliminate the radial sw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More