

Seven-degree-of-freedom bionic somatosensory mechanical arm
A bionic somatosensory and robotic arm technology, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as few joints, difficulty in effectively simulating human arms, and complex mechanical arm structures, so as to reduce misoperation, high sensitivity, and general purpose good sex effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described in detail below in conjunction with the accompanying drawings, so that those skilled in the art can implement it with reference to the description.
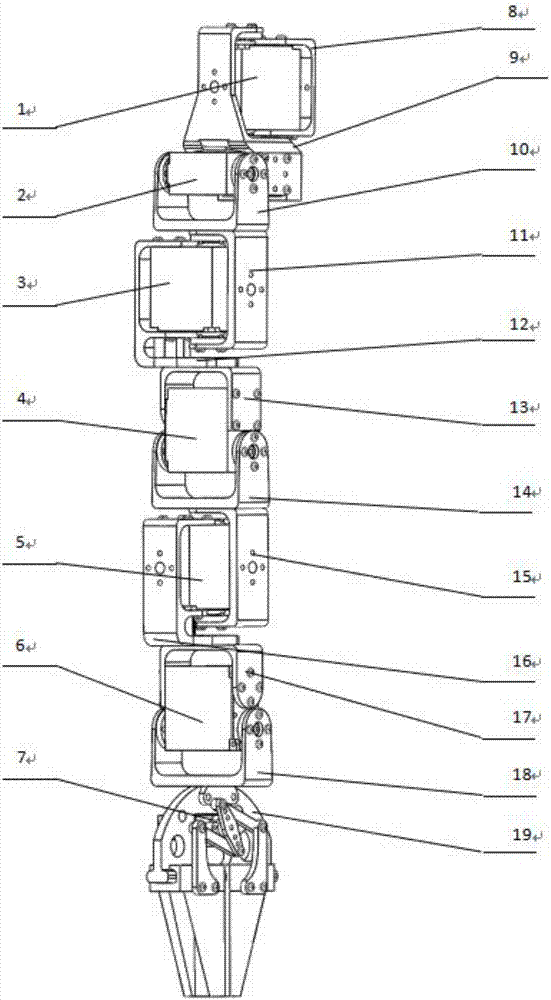
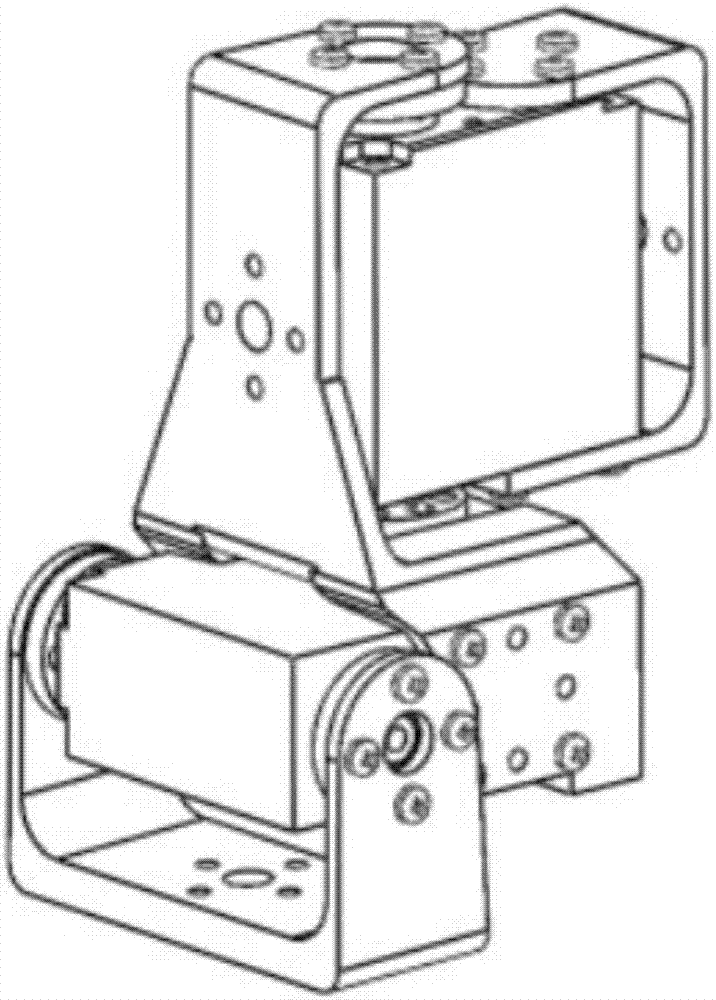
[0037] The invention provides a seven-degree-of-freedom bionic somatosensory manipulator, which includes an inertial system somatosensory system and an actuator.
[0038] The inertial system body sensing system includes three MPU6050 six-axis accelerometer gyroscopes. The MPU6050 integrates a 3-axis gyroscope and a 3-axis acceleration sensor. Combined with the digital motion processor (DMP) that comes with the MPU6050, it can directly output a quadruple sensor to the microcontroller. At the same time, the inertial system composed of three MPU6050s can accurately locate the spatial position of the human arm, which greatly improves the overall accuracy.
[0039] The actuator includes RDS3115 steering gear. RDS3115 is a high-torque digital steering gear with quick response. It c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More