

Electronic speed control calibration method and system
A calibration method and ESC technology, applied in the field of unmanned aerial vehicles, can solve the problems of cumbersome operation process, poor calibration effect, long calibration time, etc., and achieve the effect of overcoming cumbersome operation, expanding receiver types, and easy operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
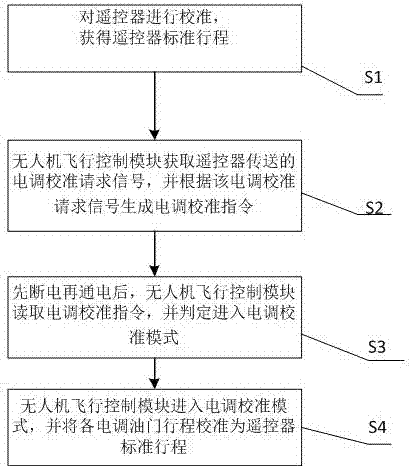
[0062] This embodiment provides an ESC calibration method, refer to figure 1 , including the following steps:
[0063] S1: After the UAV is assembled and powered on, first calibrate the remote controller to obtain the standard stroke of the remote controller;
[0064] Since the stroke in the flight control module of the UAV is certain, if the remote controller is used together with the flight control module of the UAV, the stroke of the remote controller must be calibrated to the stroke of the flight control module of the UAV. The stroke of the aircraft flight control module is 1000us-2000us, therefore, it is necessary to standardize the stroke of the remote control to 1000us-2000us. It should be noted that the wireless signal includes a PWM signal, a PPM signal, etc. In this embodiment, the wireless signal mentioned is a PWM signal, and the range of the pulse width is 1000us-2000us.
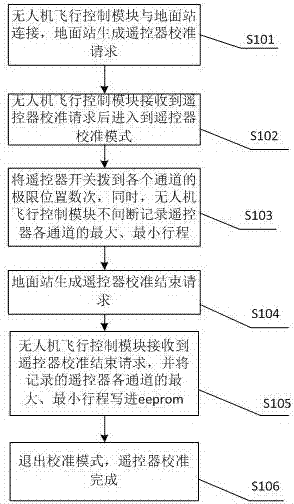
[0065] see also figure 2 , where the remote control calibration method is as follows:
...
Embodiment 2
[0085] On the basis of Embodiment 1, this embodiment provides an ESC calibration system, refer to Figure 4 , including a remote controller, a drone and a ground station, the drone is equipped with a drone flight control module and a receiver wirelessly connected to the remote controller, the receiver is connected to the drone flight control module, without The man-machine flight control module is connected with the ground station;
[0086] Wherein, the remote controller is used to send the ESC calibration request signal and the wireless signal corresponding to the throttle of the remote controller to the receiver; the receiver is used to receive the wireless signal from the remote controller and transmit the wireless signal to UAV flight control module;
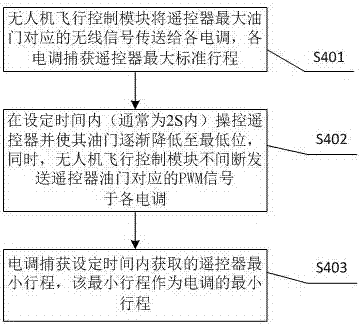
[0087] The UAV flight control module is used to generate the ESC calibration command, read the ESC calibration command and determine to enter the ESC calibration mode, so as to complete the throttle stroke calibration of ea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More