

RRT algorithm based path planning method
A technology of random search and path planning, applied in two-dimensional position/channel control and other directions, it can solve the problems of large path redundancy, increased path length, and many turns, reducing the number of tree nodes and reducing redundancy. node, easy-to-walk effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
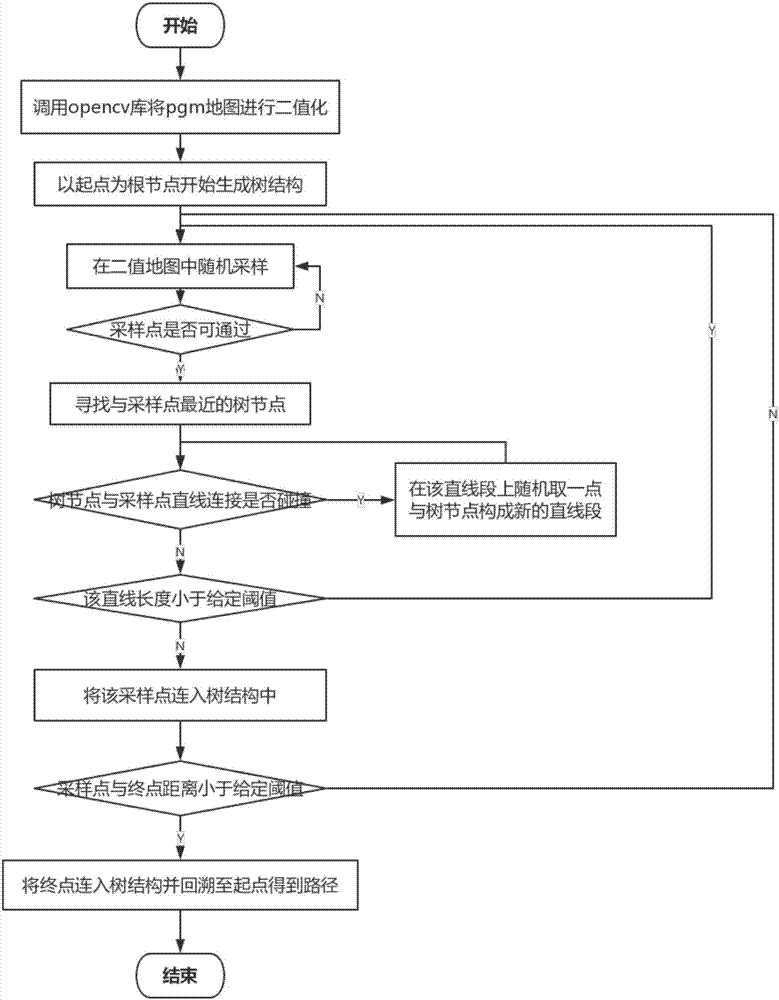
[0033] Such as figure 2 Shown, the specific implementation steps of the present invention are described in detail as follows:
[0034] Step 1: Use the slam algorithm or other mapping algorithms to obtain the map information of the current environment, pass in the image in .pgm format, call the opencv library function imread() to read in the form of gray value, and get the matrix variable of opencv Mat, and then convert it into a two-dimensional array according to the gray value of each pixel. If the gray value is greater than 240, make it 0, otherwise it is 1. 0 means you can pass, 1 means there is an obstacle, The binarization process is completed;
[0035] Step 2: Given the start point and end point, if the location of the robot has been located by a positioning algorithm such as SLAM, then the start point is the current point of the robot, and the end point is the target point. Let the coordinate point of the starting point be the root node of the tree, set its parent no...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More