

Control method for controlling flight region of unmanned plane
A control method and UAV technology, applied in the field of UAV flight area control, can solve the problems of obstacle response, failure to take into account the operation mode of UAV, and inability to adapt to the high maneuverability of UAV.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
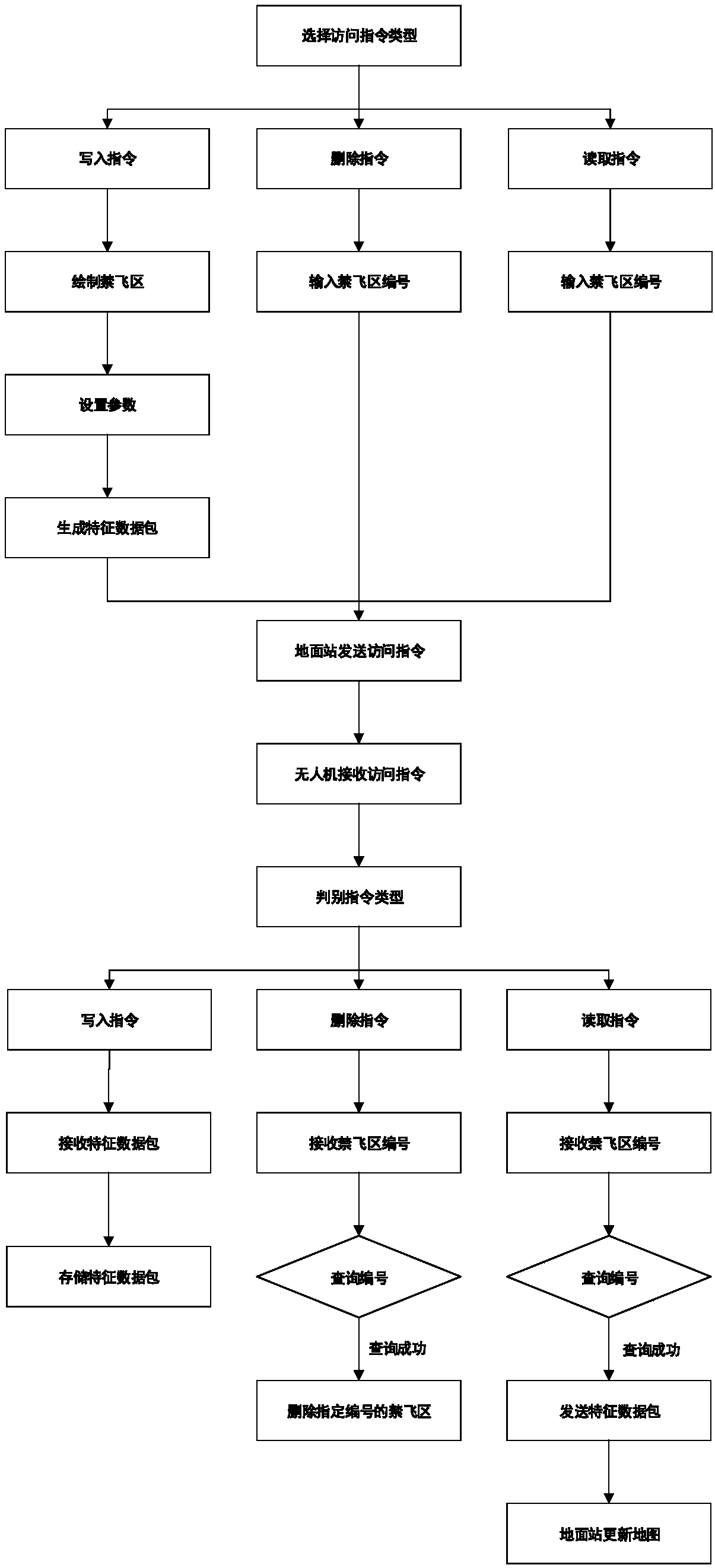
[0083] Such as figure 1 Shown, a kind of visit and operation method of no-fly zone, wherein the visit of no-fly zone comprises the following steps:
[0084] S01: Select the type of access command at the ground station, the command type includes write command, delete command and read command;
[0085] S02: Input different command parameters at the ground station according to different command types. To write a command, you need to draw a no-fly zone, set parameters and generate a characteristic data packet. To delete and read commands, you need to input the no-fly zone label;
[0086] When writing a polygonal no-fly zone, select the type of no-fly zone on the ground station as polygon, and select several vertices on the map of the ground station, and input the height of the no-fly zone, speed limit coefficient, and maximum constant velocity after confirmation. When drawing a circular obstacle, select the type of no-fly zone on the ground station as a circle, and select the cen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More