

Method for planning repetitive motion of redundant manipulator based on new numerical solver
A numerical solution and repetitive motion technology, applied in manipulators, program-controlled manipulators, instruments, etc., can solve problems such as difficult digital motor drive and control, and achieve the effect of reducing difficulty and simplifying the control process.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0025] The present invention will be further described below in conjunction with the accompanying drawings, but the implementation and protection of the present invention are not limited thereto.
[0026] figure 1 The overall process shown is mainly composed of the quadratic programming problem of repetitive motion of the redundant manipulator, the piecewise linear projection equation, the solution of the new numerical solver, and the movement of the manipulator driven by the lower computer. Firstly, the repetitive motion planning of the redundant manipulator is designed as a quadratic programming problem on the velocity layer, then the quadratic programming problem is transformed into a piecewise linear projection equation, and then the piecewise linear projection equation is solved by a new numerical solver, and finally Pass the solution result to the lower computer to drive the movement of the mechanical arm.
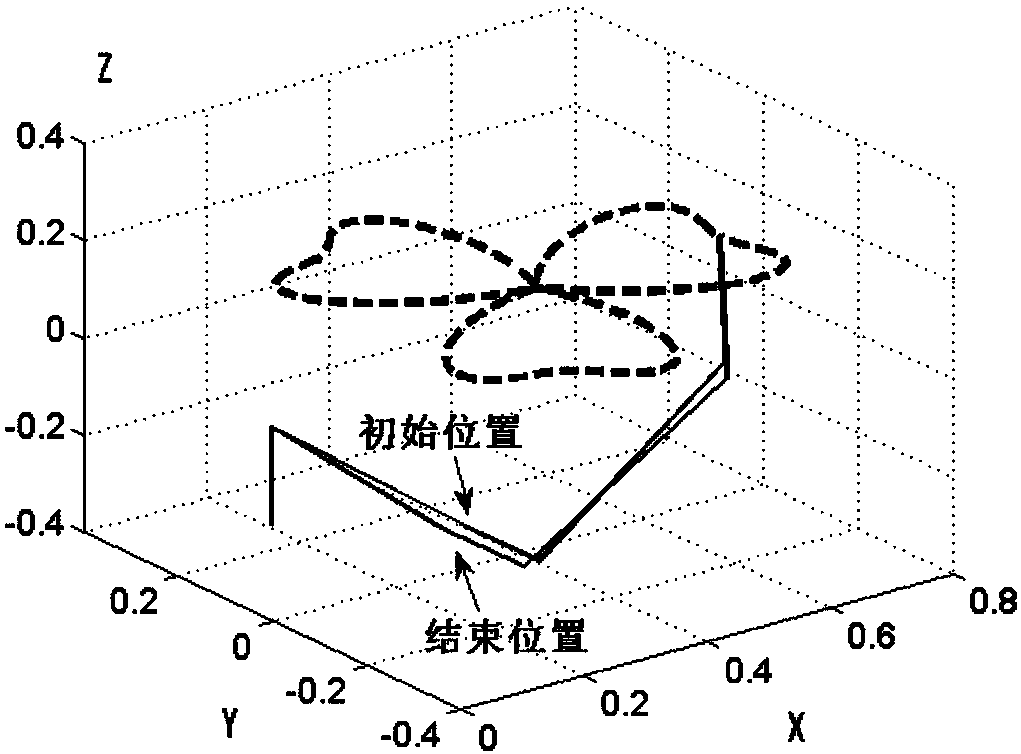
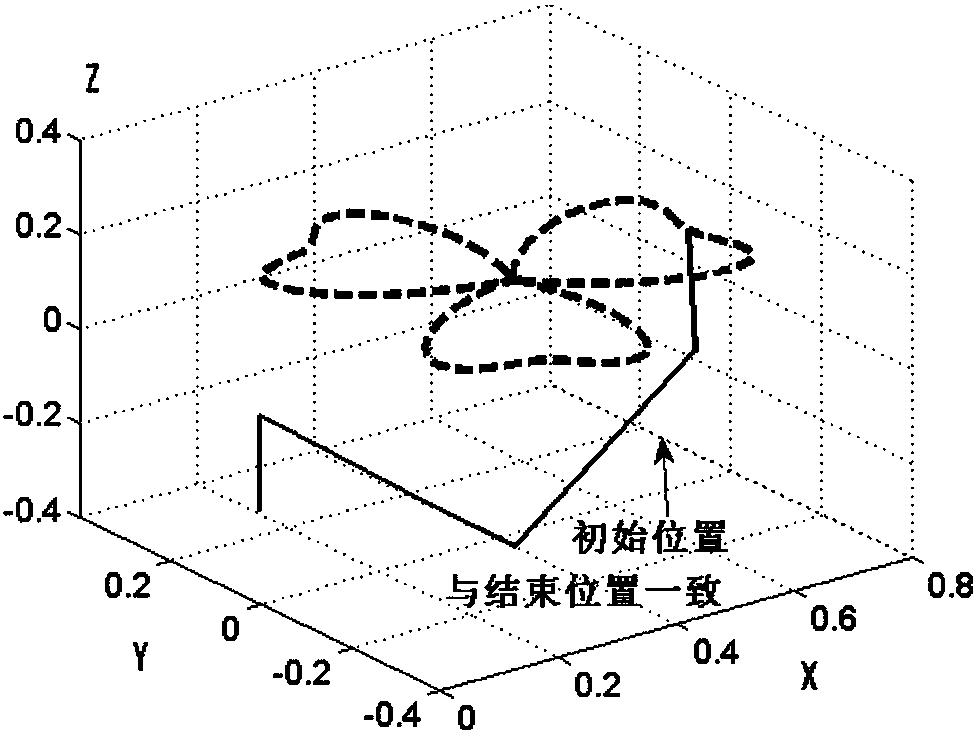
[0027] Figure 2a The figure shows a redundant manipulator pe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More