

Automatic recognition method of transformer substation touring robot and touring robot
An identification method and robot technology, applied in the field of inspection robots, can solve problems such as restricting the promotion and application of remote robot inspection platforms and increasing operating costs, so as to reduce the identification process and avoid blind spots and misjudgments
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0030] In order to better understand the technical solution of the present invention, it will be described in detail below through specific embodiments in conjunction with the accompanying drawings:
[0031] An autonomous identification method for a substation inspection robot of the present invention includes an LED display screen number identification method and a display light color identification method.
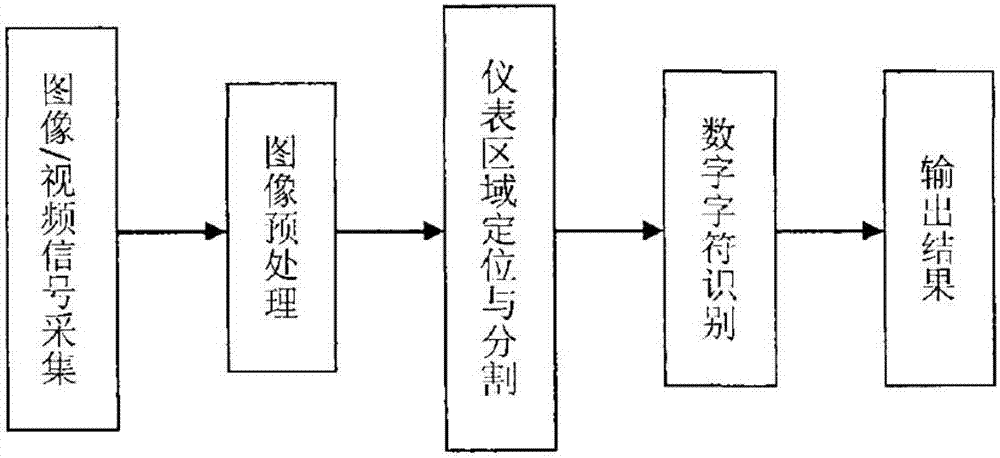
[0032] The LED reality screen of the substation usually adopts a seven-segment digital display instrument, and its screen digital recognition method includes the following steps:
[0033] Step A1, image and video signal acquisition step. The substation inspection robot moves to the target position of the LED display screen of the substation under the command of the control center, and then obtains the image signal of the LED display area through the camera equipment mounted on it.
[0034] Step A2, an image preprocessing step, performs enhancement processing on the imag...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More