

Robot trajectory planning method based on fourth-order cubic B-spline function and humanoid robot platform
A technology of humanoid robot and spline function, which is applied in the direction of manipulator, program control manipulator, manufacturing tools, etc., which can solve the problems of reducing service life and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The purpose of the present invention is to overcome the shortcomings and deficiencies of the prior art, and provide a robot trajectory planning method and a humanoid robot platform based on a fourth-order cubic B-spline function.
[0059] Wherein, a robot trajectory planning method based on a fourth-order cubic B-spline function comprises the following steps:
[0060] Step 1: Define a B-spline function, and derive the mathematical model of the B-spline function through the defined B-spline function;
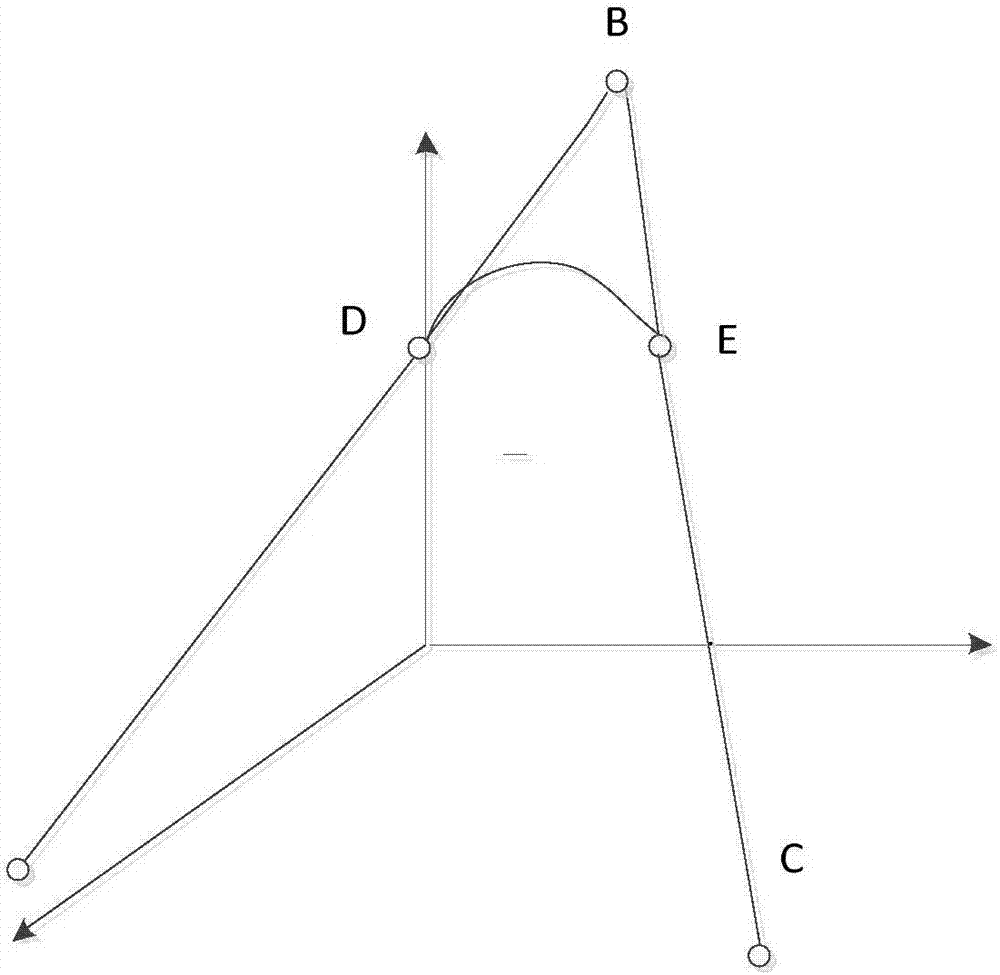
[0061] Step 2: Solve the expression of the fourth-order cubic B-spline function: through the defined B-spline function, first assume the expression of the fourth-order cubic B-spline function, through its boundary conditions and the first-order, second-order, and third-order reciprocals All must be connected at the shape-value point, and twelve conditions can be obtained to solve the parameter solution of the fourth-order cubic B-spline function, thereby obtaining the expr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More