

A new pipeline robot
A pipeline robot and pipeline technology, applied in the field of new pipeline robots, can solve the problems of weak signal in metal pipes, difficult data interconnection, loss of master controller of pipeline robots, etc., and achieve the effects of wide application range, small size and exquisite structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
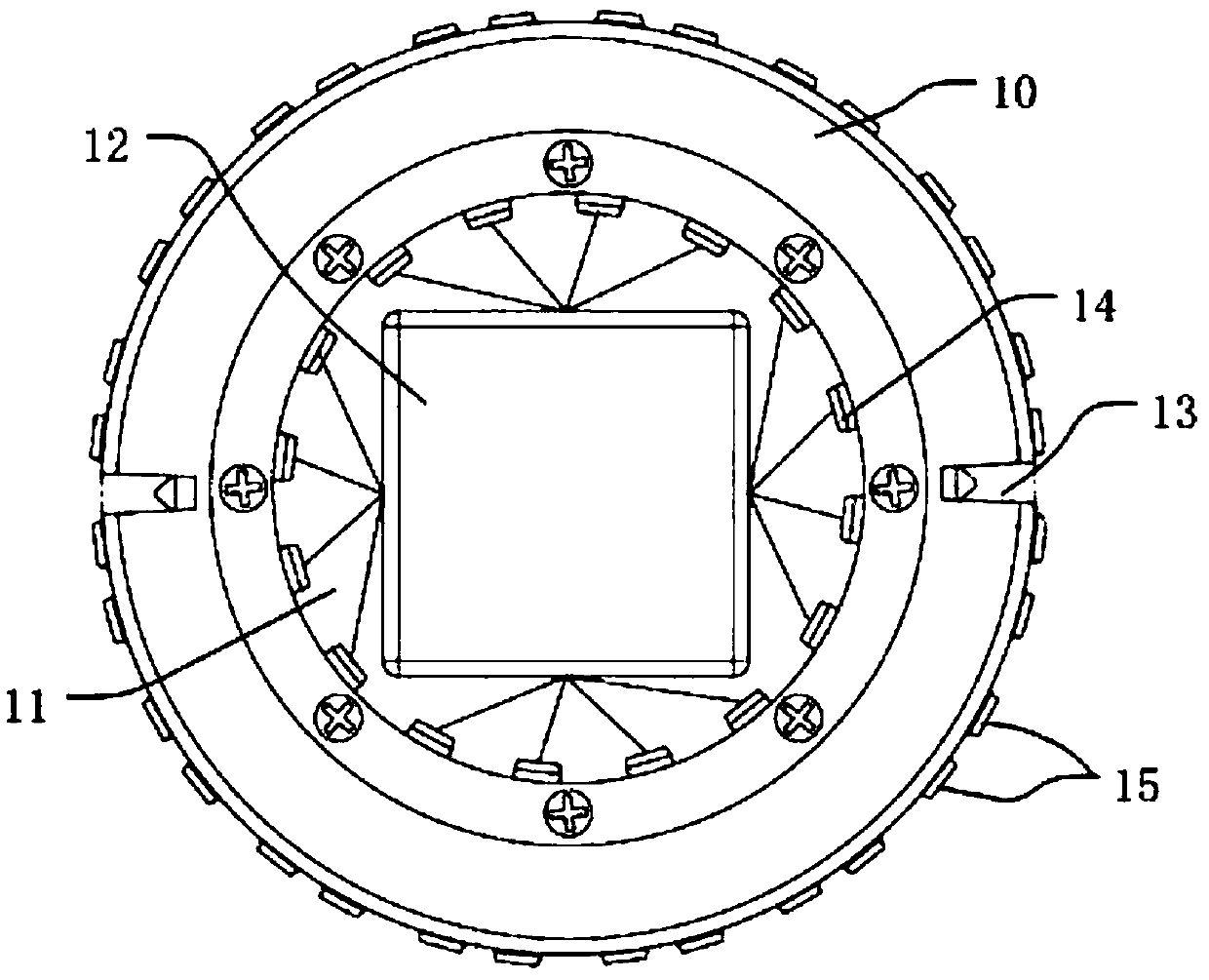
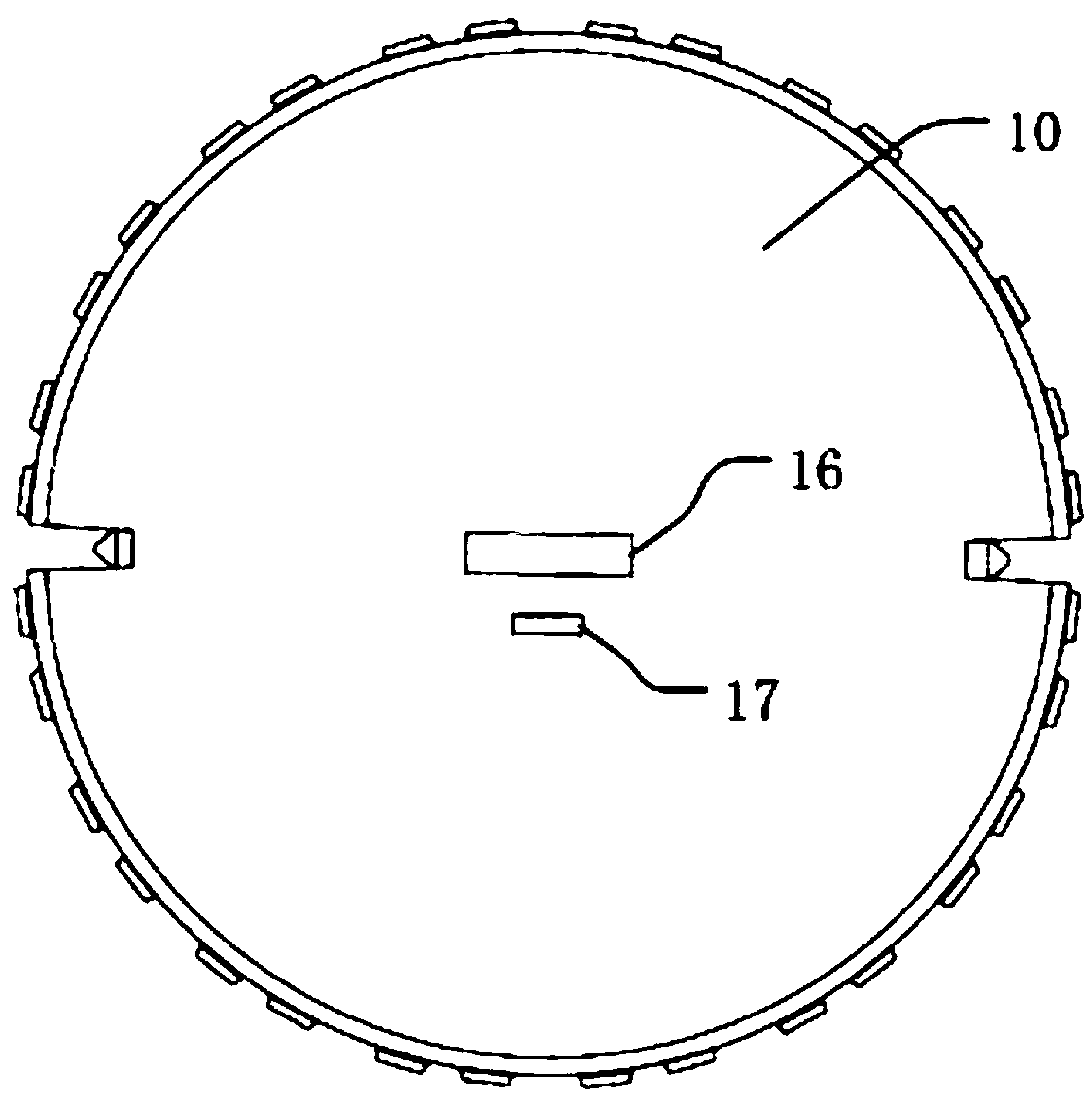
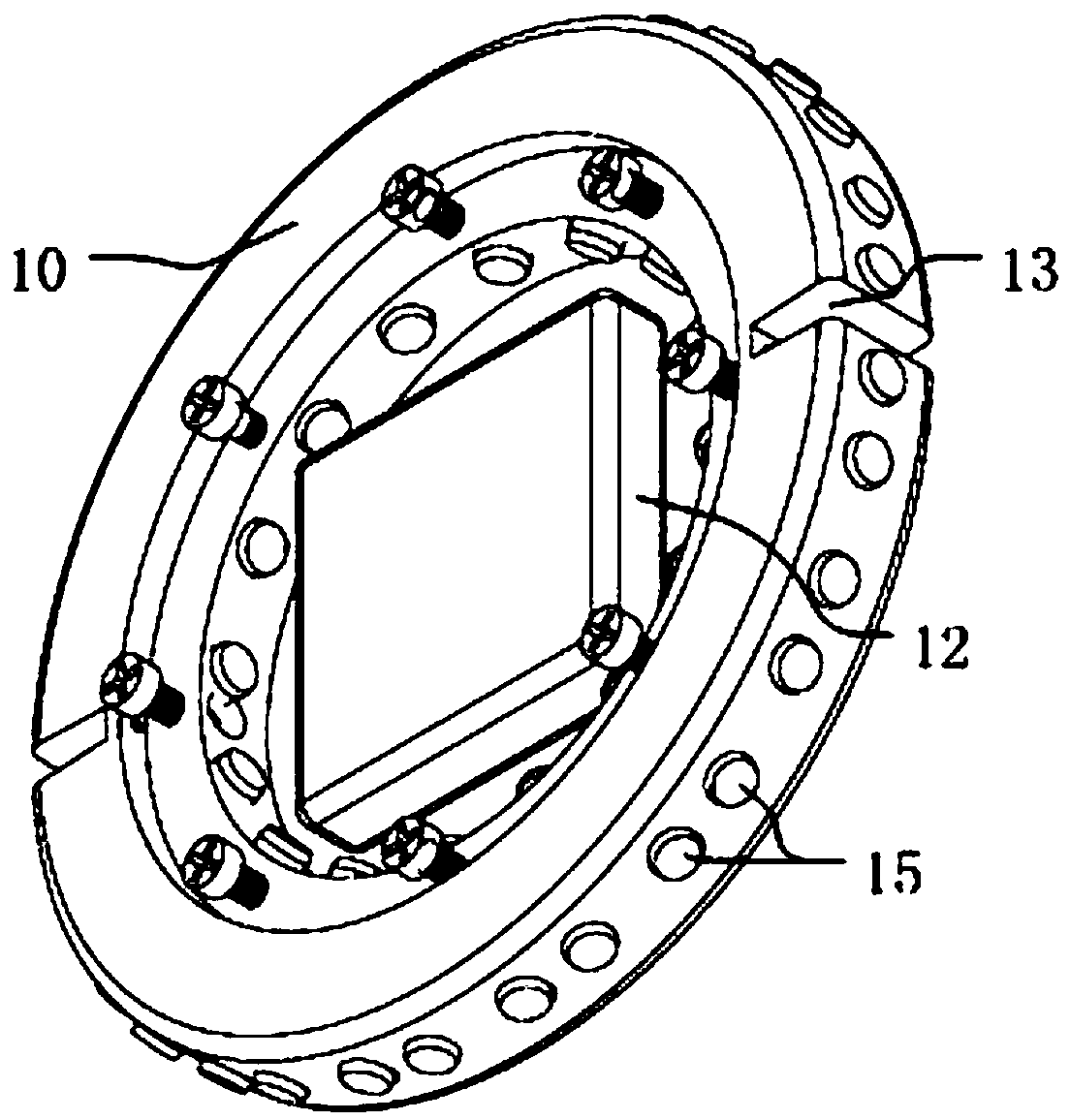
[0044] A new type of pipeline robot, see attached figure 1 - attached Figure 4 As shown, it includes a housing 10, a magnetic traveling device and a control mechanism 12;
[0045] The housing 10 is used to roll and travel in the pipeline; the housing 10 is a disc-shaped structure, and a concave circular groove 11 is provided in the middle of the front of the housing 10, and the annular side of the housing 10 is the first side, The annular inner wall of the circular groove 11 is the second side, and the first side is provided with mutually symmetrical camera gaps 13, and a camera 18 and an LED light 19 are also installed in each camera gap 13;
[0046]The magnetic force traveling device is used to provide the power for the rolling movement of the casing 10, and adjust the direction and position of the traveling by changing the magnitude of the magnetic force; Installed on the second side at equal intervals, the magnet groups 15 are installed on the first side at equal interv...
Embodiment 2
[0050] The difference between this embodiment and Embodiment 1 is that the magnet group 15 of the present embodiment is composed of a permanent magnet and an electromagnet, and the shapes of the permanent magnet and the electromagnet are both circular button shapes. This embodiment adopts this The combination of 15 magnet groups makes the magnetic force of one permanent magnet unable to fully bear the weight of the entire pipeline robot, and cannot be stably adsorbed on the inner wall of the pipeline, while the other electromagnet only needs to provide a small amount of magnetic force to achieve adsorption on the inner wall of the pipeline. purpose, and can achieve the purpose of advancing in the pipeline through the magnetic force conversion of different magnet groups 15.
Embodiment 3
[0052] The difference between this embodiment and the above two embodiments is that please refer to the attached Figure 5 And attached Figure 6 As shown, in this embodiment, tapered terminals 20 are respectively provided on the front of the housing 10 and the back of the housing 10 to prevent falls, and the tapered terminals 20 will not cause the phenomenon of falling when encountering obstacles during the pipeline robot’s travel. , will rotate around the tapered terminal 20 once, and continue to move forward;
[0053] The structure is exquisite, which avoids the disadvantages of traditional pipeline robots that cannot work normally after being dumped in the pipeline, and can work normally under harsh conditions such as foreign objects in the pipeline, pipeline bends, and pipeline narrowing.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More