

Synchronous telescopic deformation type track leg composite traveling device
A walking device and deformation wheel technology, which is applied in the field of engineering vehicles, mobile robots, and machine walking devices. It can solve the problems of unreliable deformation, jamming, and large shaking of the telescopic rod, and achieve simple driving mode and increase the grounding length of the track. , The effect of a large track ground length
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
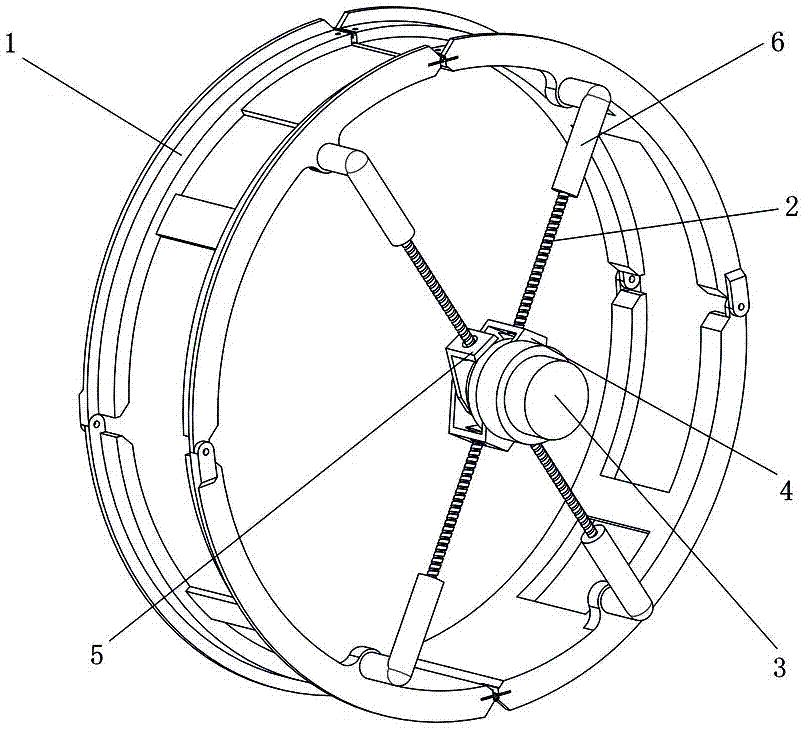
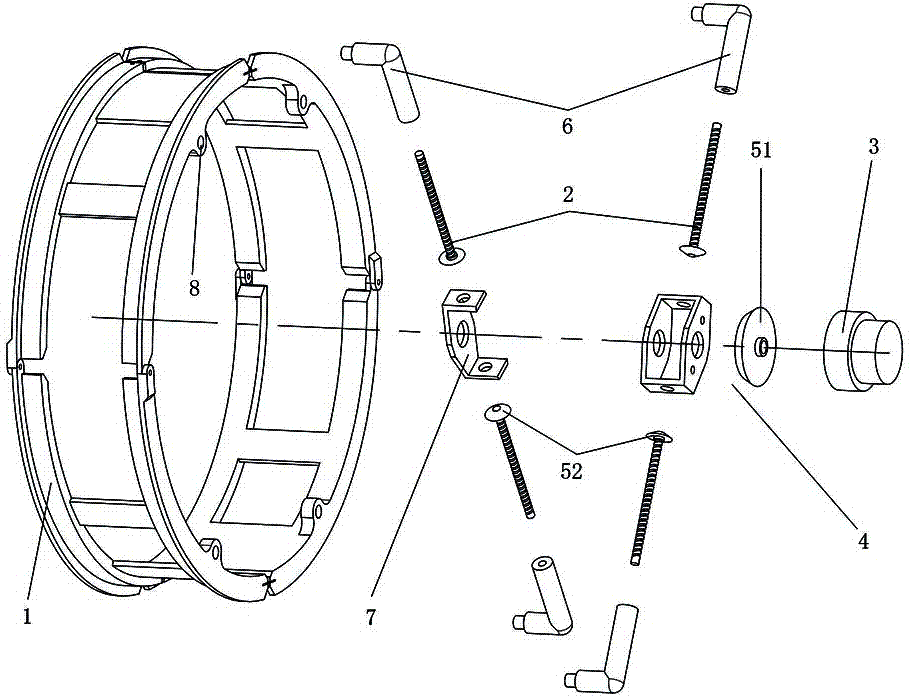
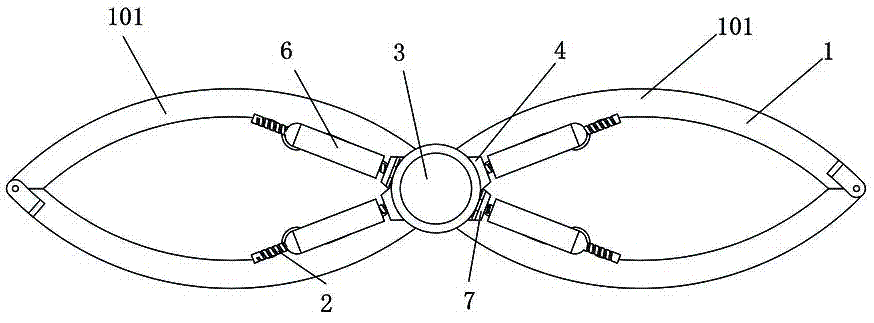
[0032] Such as Figure 1 to Figure 6 As shown, the synchronously telescopic and deformable wheel-track-leg compound walking device of the present invention includes a rim 1, a traveling drive mechanism and a deformed wheel component, and a crawler belt (not shown) is wound on the rim 1, and the traveling drive mechanism can It is selected according to actual needs, and generally adopts a structure including a traveling power device, a track driving wheel and a track driven wheel. The deformed wheel parts include a deformed motor 3 and more than three supporting screw rods 2. The deformed motor 3 is located in the middle of the rim 1 and is installed on the motor seat 4. The supporting screw rod 2 is fitted with a nut joint 6 and a nut joint 6 through threaded fit. Contact with the rim 1 to form a linkage support, and the supporting s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More