

CKF filtering-based vehicle dynamic model auxiliary inertial navigation combined navigation method
A vehicle dynamics and integrated navigation technology, which is applied in the field of vehicle dynamics model-assisted inertial navigation integrated navigation based on CKF filtering, and can solve problems such as the inability to maintain navigation accuracy for a long time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0097] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
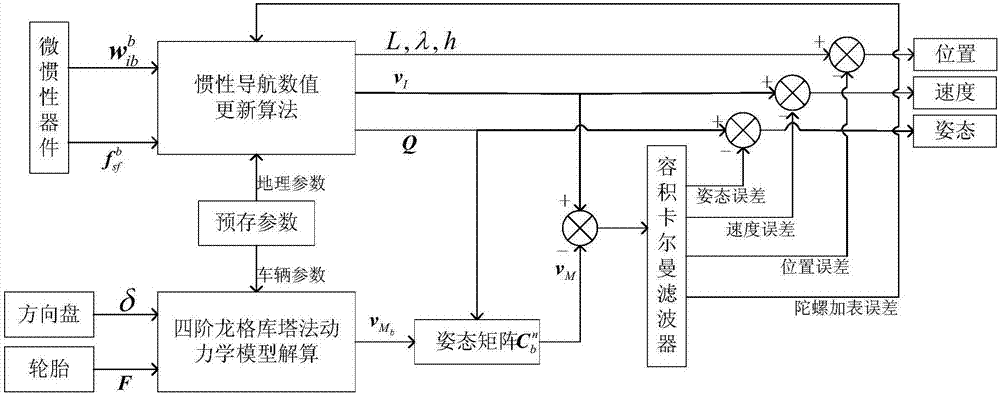
[0098] Such as figure 1 As shown, the present invention provides a vehicle dynamics model-assisted inertial navigation integrated navigation method based on CKF filtering, comprising the following steps:
[0099] Step 1, according to the angular increment and specific force output by the micro-inertial device, use the inertial navigation (INS) numerical update algorithm to solve the attitude, speed and position of the vehicle;
[0100] Among them, the INS numerical update algorithm uses the six-axis accelerometer and gyroscope to measure the specific force and angular increment of the carrier, and calculates the navigation parameters of the carrier at the current moment according to the known initial conditions. The navigation coordinate system n adopts the northeast sky geographic coordinate system, and the carrier coordinate system b ado...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More