

Smith pre-estimation control method based on improved neural network
A technology of neural network and control method, applied in the field of Smith predictive control based on improved neural network, can solve problems such as slow convergence speed, system instability, oscillation, etc., to improve practicability, enhance stability, and increase tuning speed Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] Below in conjunction with specific embodiment, further illustrate the present invention. It should be understood that these examples are only used to illustrate the present invention and are not intended to limit the scope of the present invention. In addition, it should be understood that after reading the teachings of the present invention, those skilled in the art can make various changes or modifications to the present invention, and these equivalent forms also fall within the scope defined by the appended claims of the present application.
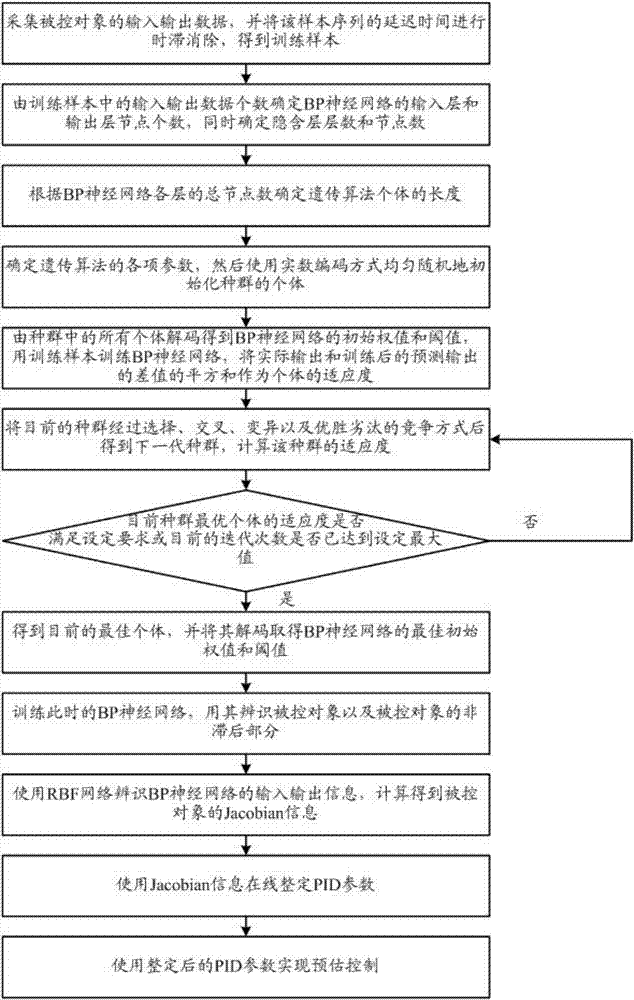
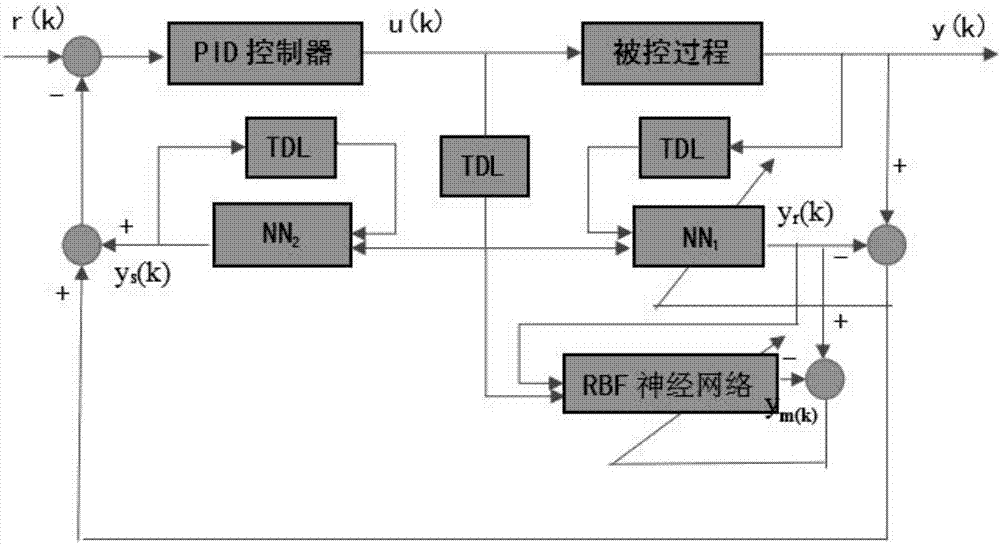
[0039] image 3 is the structural diagram of the entire predictive control system, including the large time-delay controlled object G p (s), NN1 and NN2 neural network modules, and RBF network identification module. Among them, the NN1 neural network is used to identify the controlled process, and the NN2 neural network has the same structure as NN1, which is used to identify the non-delayed part of the controlled process, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More