

Variable-pitch multi-rotor unmanned aerial vehicle with variable special-shaped structure
A multi-rotor unmanned aerial vehicle, a variant technology, applied in the field of aircraft and unmanned aerial vehicles, to achieve the effect of reducing turbulence, uniform lift distribution, and high level flight speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
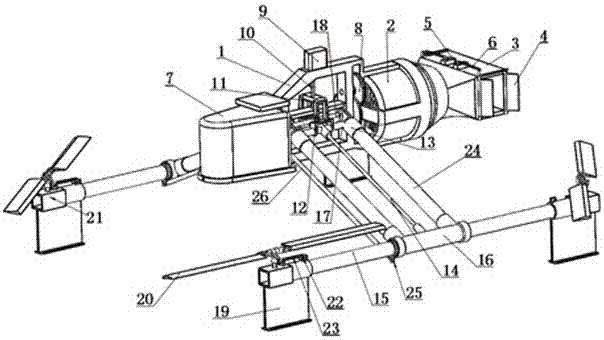
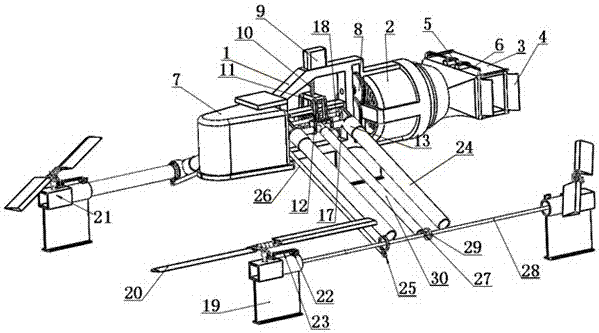
[0038] combined with figure 1 As shown, a variable-pitch multi-rotor UAV with a variable structure includes a frame 1, a power unit installed on the frame 1, a fuel tank 7 for supplying oil to the power unit, and a lift device connected to the power unit. , and an adjustment device for adjusting the pitch angle of the lift device relative to the frame 1, a speed reduction device is arranged between the lift device and the power device, the power device is a turboshaft engine and an exhaust box is connected to the exhaust end 3. A deflector for controlling the direction and flow velocity of the exhaust airflow is installed on the exhaust box 3; the deflector includes deflectors 4 symmetrically installed at both ends of the exhaust box 3, and the two ends are respectively hinged on the The deflector push-pull rod 6 used to control the synchronous deflection of the deflector 4 on the deflector 4, and the deflector control steering gear 5 installed on the exhaust box 3 for driving...
Embodiment 2
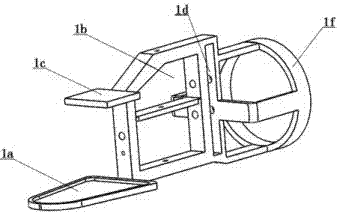
[0043] In order to better realize the present invention, on the basis of embodiment 1, further in conjunction with the attached figure 1 and 3 As shown, the frame 1 is composed of five integrally formed parts, specifically including a power plant mounting seat 1f for mounting the turboshaft engine, and the power plant mounting seat 1f is a hollow cylindrical structure with one end open, And one end away from the opening is provided with an installation cavity 1d for installing the deceleration device 8, and adjacent to the installation cavity 1d is a lift device installation cavity 1b for installing the lift device; and located in the lift device installation cavity 1b An electronic equipment installation seat 1c is provided at the upper end of the side away from the power device installation seat 1f, and a fuel tank installation seat 1a for placing the fuel tank is provided at the lower end of the electronic equipment installation seat 1c. It is worth noting that the electro...
Embodiment 3
[0045] In order to better realize the present invention, on the basis of the structure and principle of embodiment 2, further in conjunction with the attached Figure 1-3 As shown, the lift device includes support arms symmetrically arranged on both sides of the frame 1 in a T-shape, and the support arms include an arm standpipe 15 arranged parallel to the length direction of the frame 1 and a The machine arm vertical tube 15 is a machine arm horizontal tube 24 arranged at 90°; the machine arm horizontal tube 24 is in principle machine arm vertical tube 15 and one side of the machine arm vertical tube 15 is hinged on the side wall of the lifting device installation chamber 1b and the machine arm horizontal tube 24 The quantity is two that are arranged in parallel; each only end of described machine arm standpipe 15 is provided with the rotor mechanism that is used for providing lift, and described rotor mechanism communicates with the described support arm through the drive sha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More