

Synchronous positioning and map establishment method and equipment
A map construction and synchronous positioning technology, applied in the field of robotics, can solve the problems of low precision and low convenience, achieve high positioning precision and reduce cumulative errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
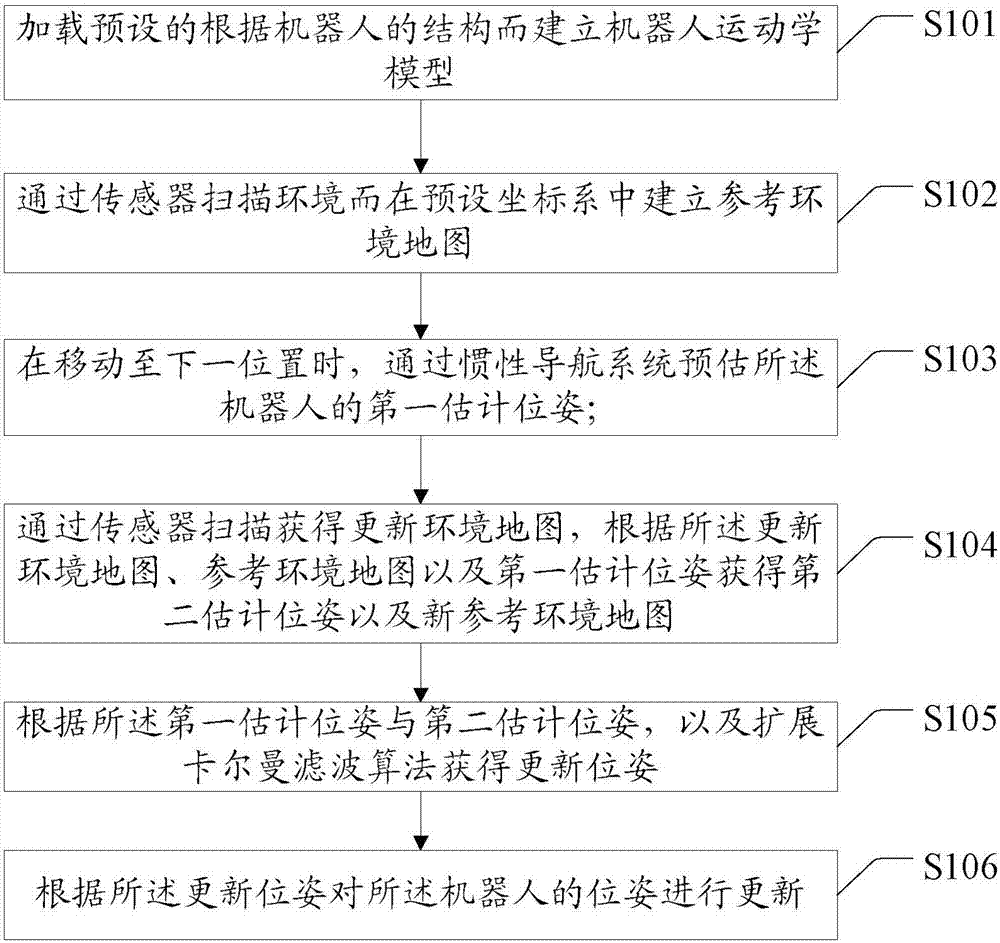
[0060] Please see figure 1According to the first embodiment of the synchronous positioning and map construction method of the present invention, the synchronous positioning and map construction method is used for multiple robots, and the synchronous positioning and map construction method includes the steps:
[0061] Step S101, loading a preset robot kinematics model established according to the structure of the robot.
[0062] Because the structure of the robot is different, there are cases where the motion structure of the large and small functions is different. Therefore, in order to target different robots, the kinematics model for each structure can be preset, so as to facilitate the accurate description of the motion pose of the robot. Specifically, the first kinematics model can include:
[0063] 1. Determine...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More