

AGV path planning method based on time window optimizing
A path planning and time window technology, applied in the field of logistics systems, can solve problems such as time window conflicts, and achieve the effects of simplifying path nodes and short paths, improving work efficiency, and reducing computational complexity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
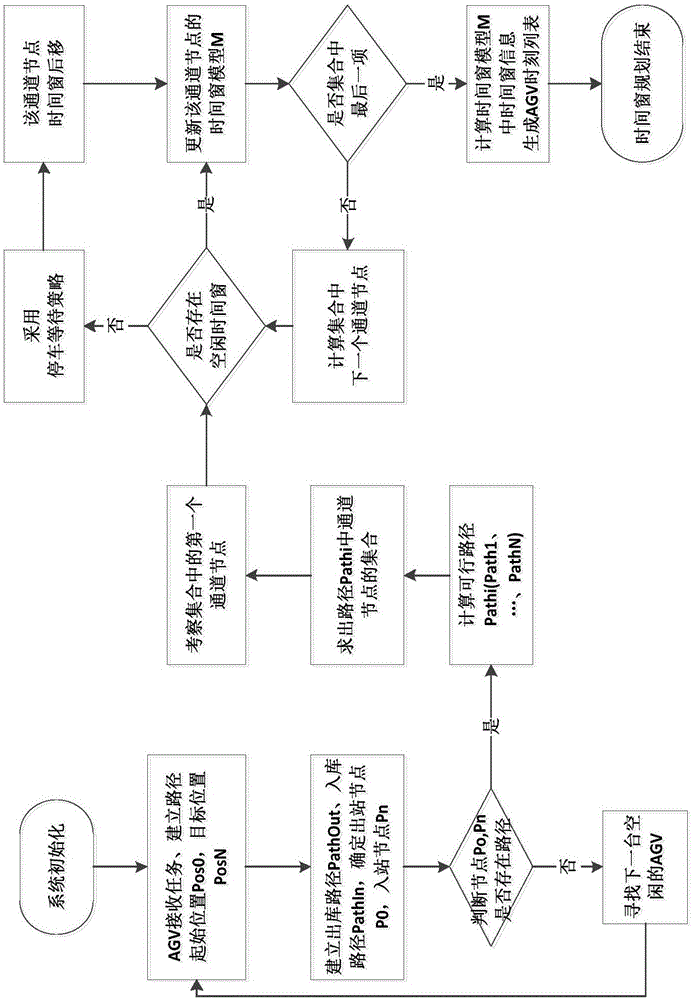
[0045] Such as figure 1 As shown, an AGV path planning method based on time window optimization, the method includes the following sequential steps:
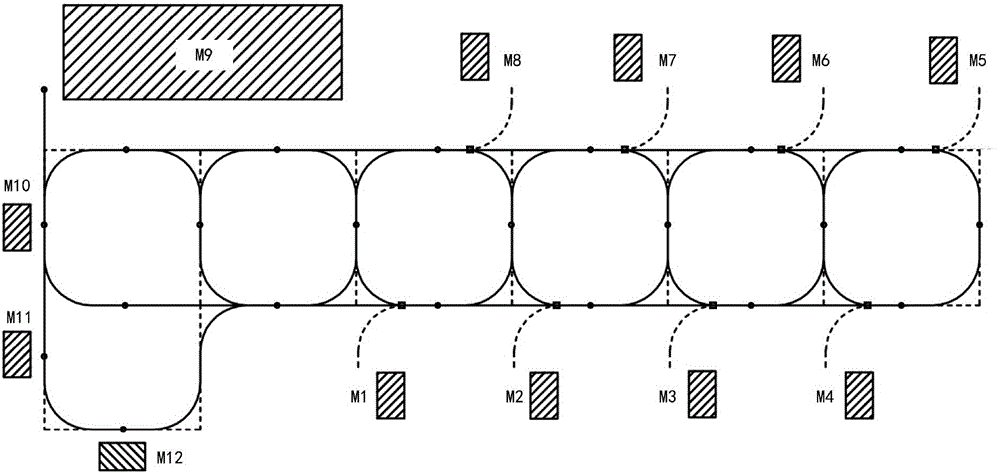
[0046] (1) Set the information of key nodes and entry and exit stations in the map of the transportation system, establish a grid path map of the same transportation route as the workshop object, initialize system information and update the grid path map, and set the coordinate parameters of key nodes, grid The map information is stored in the database, and the information in the AGV vehicle dispatching management system is updated in real time;
[0047] (2) According to the request information of the machine tool processing station, the system receives the task, and sets the target position of the task, assigns the AGV in the idle state to receive the task, and takes the current position of the AGV as the starting position of the task, according to the starting position Select the corresponding outbound node and inbound node i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More