

Multiline laser radar mass point cloud data rapid and effective extraction and vehicle and lane line feature recognition method
A multi-line laser and point cloud data technology, which is applied in the field of environment perception of unmanned vehicles, can solve the problems of poor anti-interference ability and susceptibility to the environment, and achieve the effect of reducing consumption, reducing requirements, and fast and effective extraction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
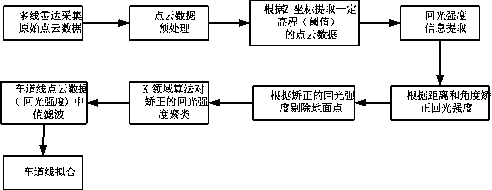
[0009] Such as figure 1 As shown, the present invention proposes a method for quickly and effectively extracting massive point cloud data of lidar without affecting vehicle and lane line feature recognition, which includes: a three-dimensional storage mode of laser radar point cloud data, and three-dimensional coordinates of point cloud data Based on the self-adaptive distance, the r-level point cloud data of the multi-layer point cloud data of the vehicle in the area of interest of the unmanned vehicle is calculated without affecting the identification of vehicle features, and the lane line is recognized according to the return light intensity corrected by distance and angle. The complete technical process is as follows:
[0010] Establish a three-dimensional storage matrix of lidar point cloud data: each lidar point cloud data contains information such as three-dimensional space position coordinates (x, y, z) under a certain spatial reference system, return light intensity...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More