

Underwater robot automatic recovery device based on unmanned ship platform and working method thereof
An underwater robot and automatic recovery technology, which is applied in underwater operation equipment, unmanned surface ships, motor vehicles, etc., can solve the problems of complex recovery of underwater robots, and achieve safe and efficient automatic recovery, easy automation, and simple structure Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The structure of the present invention will be further described below with reference to the accompanying drawings.
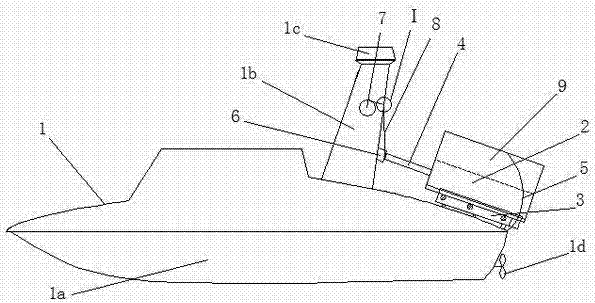
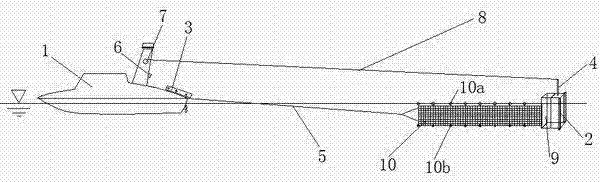
[0022] figure 1 The structure of the automatic recovery device for underwater robots based on unmanned boats is shown. In arrangement, the float 2 and the net gear storage box 9 are integrated, and the connecting rod 4 is fixed on the float 2 . Float 2, net gear storage box 9 and connecting rod 4 are jointly fixed on the track 3 on the unmanned boat deck by the connection of solenoid valve fixing device 6. The control of solenoid valve fixing device 6 is carried out automatically by the control system of unmanned boat. When the device is not in use, the solenoid valve fixing device 6 is in a closed state, and the snap ring 4b on the connecting rod is stuck by the valve shaft of the solenoid valve fixing device 6, thereby fixing the float so that it cannot slide down. When the device is required to work, the electromagnetic valve The valve fixing devic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More