

Suspension fork mechanism with three adjustable axial-direction angles for robot
A robot and suspension technology, which is applied in the field of robot and vehicle engineering, can solve problems such as slow moving speed, large landing area, and weak ability to cross obstacles, and achieve reliable and stable motion, increased range, and reliable motion.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described below in conjunction with embodiment and accompanying drawing.
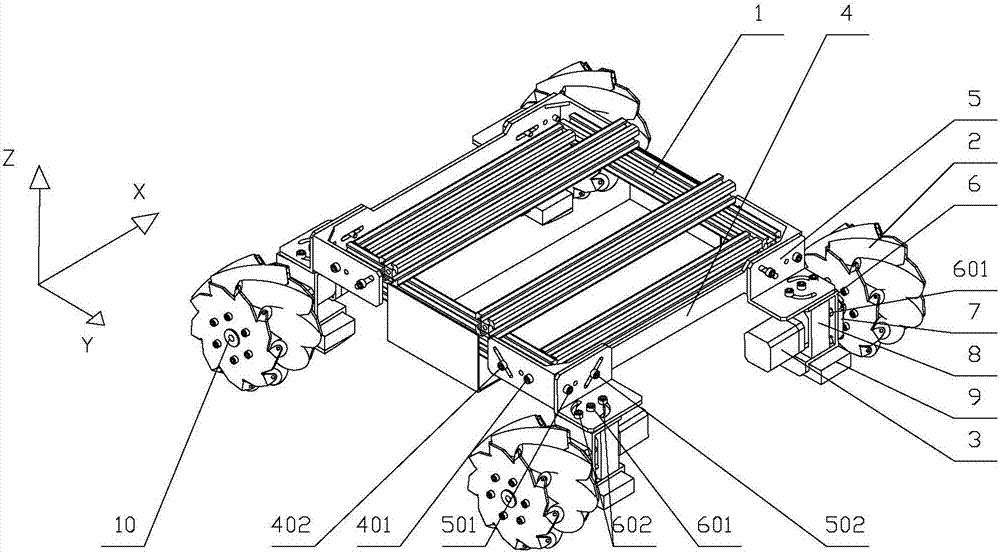
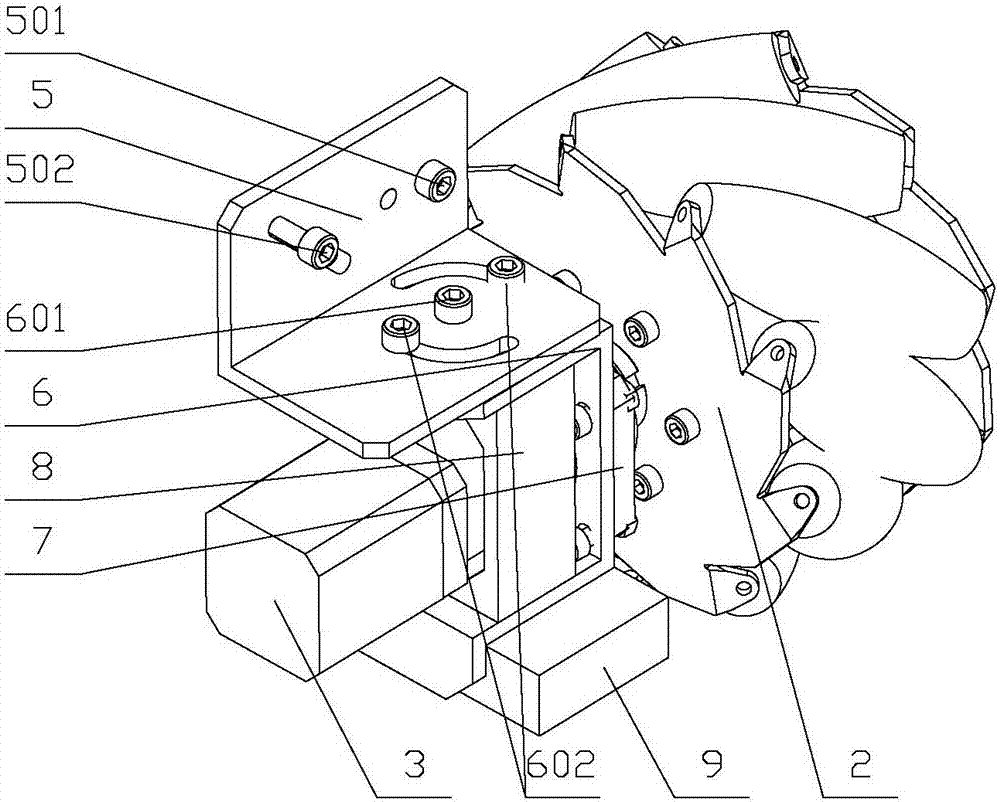
[0026] like figure 1 and figure 2 As shown, the present invention discloses a three-axis adjustable suspension mechanism for a robot, including a vehicle frame 1, two Y-direction rotating frames 4 arranged in parallel on the vehicle frame 1, and four groups independently arranged on The suspension sub-mechanism on the Y-rotation frame 4, two suspension sub-mechanisms are arranged on each Y-direction rotation frame 4, and each suspension sub-mechanism includes an X-direction rotation frame installed on the Y-direction rotation frame 4 5. The Z-direction fixed seat 6 installed on the X-direction rotating frame 5, the wheel 2 installed on the Z-directed fixed seat 6 through the wheel shaft 10 and the bearing seat 7, is installed on the Z-directed fixed seat by countersunk bolts The magnet 9 at the bottom of 6 is installed on the fastener 8 inside the Z-direct...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More