Modular foot adjustable assist device for human lower extremity exoskeleton robot
An exoskeleton robot and power-assisted device technology, which is applied in passive exercise equipment, physical therapy, etc., can solve the problems of inseparable devices and shoes, short power-assisted time, inconvenient wearing, etc., to achieve easy wearing, weight reduction, and simplified transmission Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
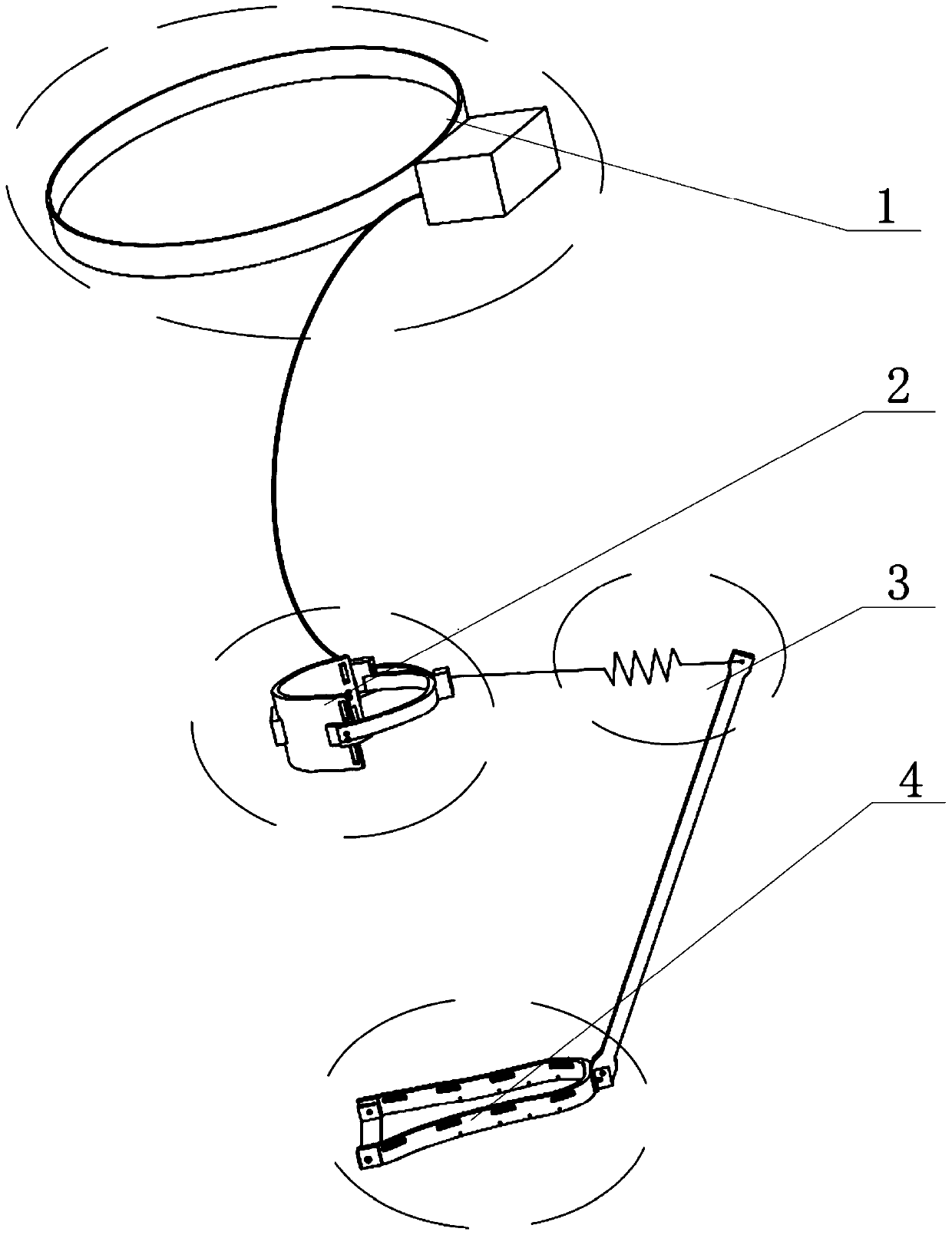
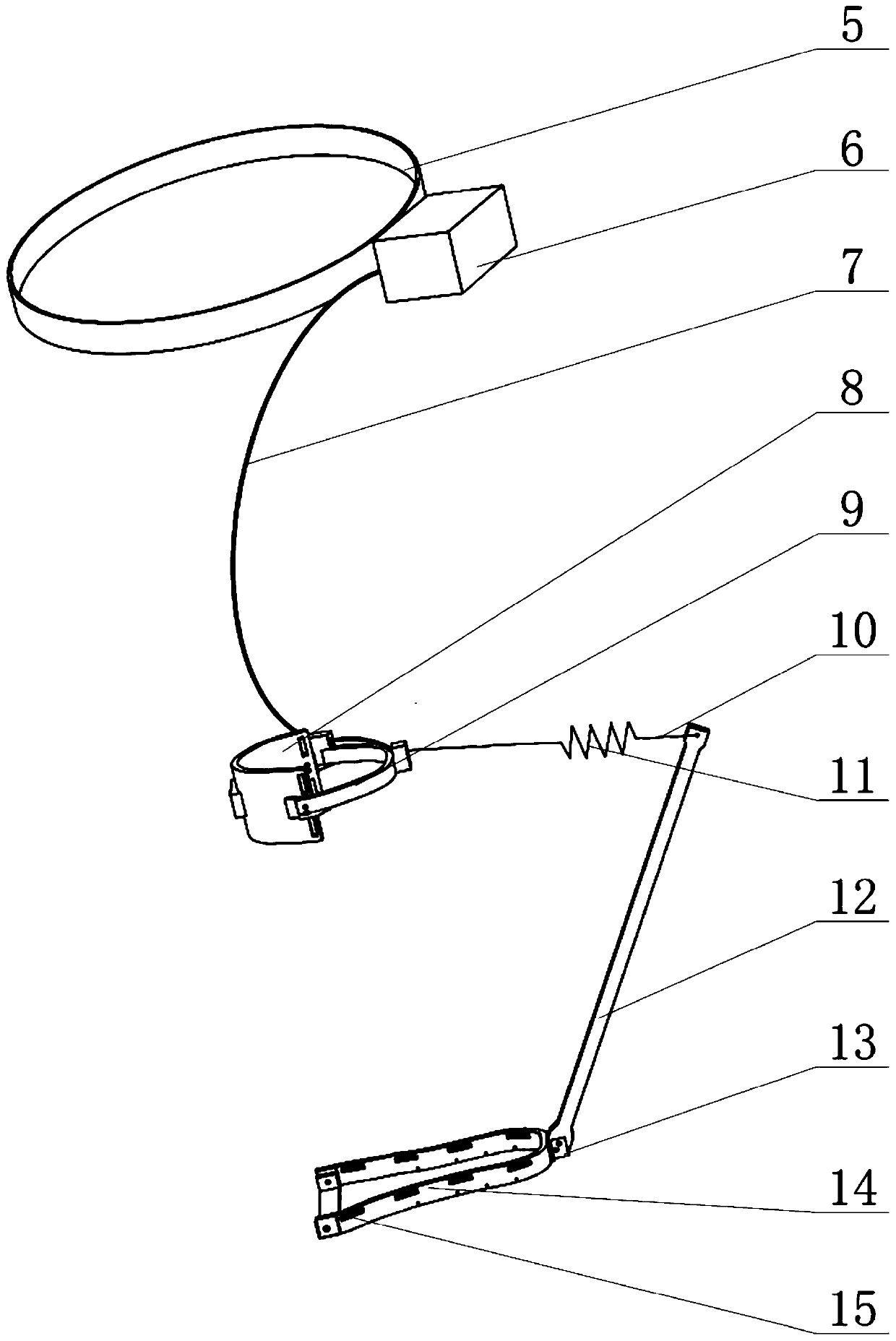
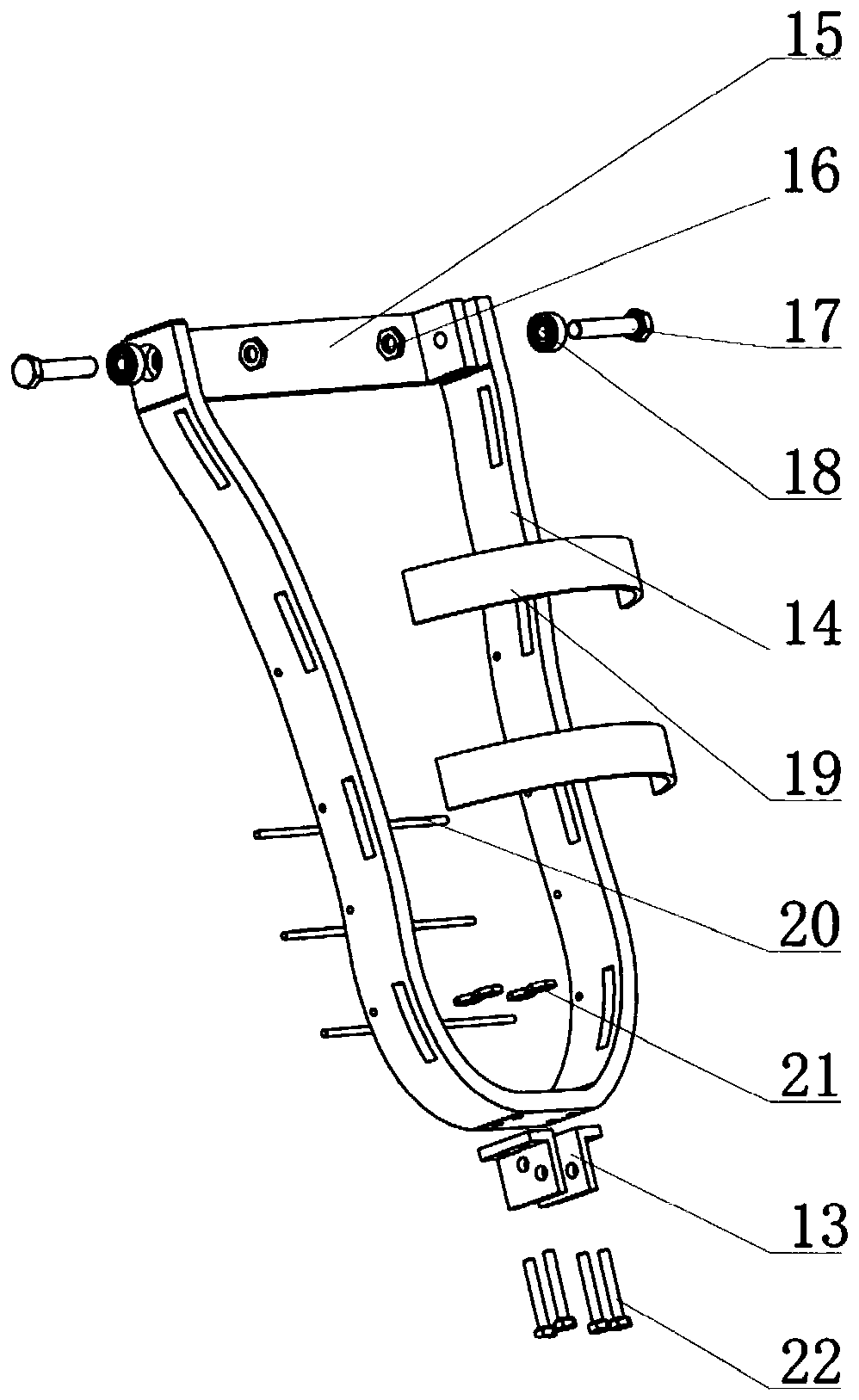
[0022] Specific implementation manner one: such as Figure 1~4 As shown, the modular foot-adjustable booster device for the human lower limb exoskeleton robot of this embodiment includes a foot-adjustable device 4, a leg fixing device 2, a spring-saving device 3, and Waist fixation device 1; the foot adjustable device includes a U-shaped groove 15, a plantar wrapping device 14, two bearings 18, and two first screws 17, a threaded hole is machined on each side of the U-shaped groove 15, Two counterbore holes are machined on the plantar wrapping device 14 corresponding to the threaded holes on both sides of the U-shaped groove 15. The U-shaped groove 15 is installed on the plantar wrapping device 14 by two first screws 17, and each screw 17 is worn There is a bearing 18, which is located on the outside of the counterbore; the plantar wrapping device 14 is provided with a first connecting rope 20, and the spring labor saving device 3 includes a spring 11, a connecting rod 12 and tw...
specific Embodiment approach 2
[0024] Specific implementation manner two: such as figure 1 with 2 As shown, two rows of circular holes are correspondingly processed on both sides of the bottom of the sole wrapping device 14 in this embodiment along its length direction, and the first connecting rope 20 is threaded on the circular holes of the sole wrapping device 14. Such a design can effectively reduce the size of the plantar wrapping device 14 under the same strength and performance requirements, thereby reducing its mass, so that the exoskeleton robot increases the mass of the human body and effectively reduces the metabolic consumption. The other components and connection relationships are the same as in the first embodiment.
specific Embodiment approach 3
[0025] Specific implementation manner three: such as figure 1 with figure 2 As shown, the plantar wrapping device 14 of this embodiment further includes a plurality of third bandages 19, and the third bandages 19 are worn on the upper part of the plantar wrapping device 14. Such a design is more convenient for human feet to wear, and can effectively fix the foot adjustable device on the foot. Other components and connection relationships are the same as those in the first or second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More