

Planning method for autonomous lane changing overtaking movement of intelligent vehicle in semi-structured environment
An intelligent vehicle and semi-structured technology, applied in the field of intelligent driving and its control, can solve the problem of unsmooth lane return of overtaking and changing lanes, improve the trajectory generation method and speed distribution method, and overcome the excessive lateral velocity and acceleration , Good fault tolerance and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0053] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0054] The present embodiment adopts the smart car refitted with a long 12m and a wide 2.5m bus, which is equipped with laser radar, millimeter wave radar, camera and GPS / IMU system, and carries out the overtaking experiment of the smart car on a standard two-way six-lane road.
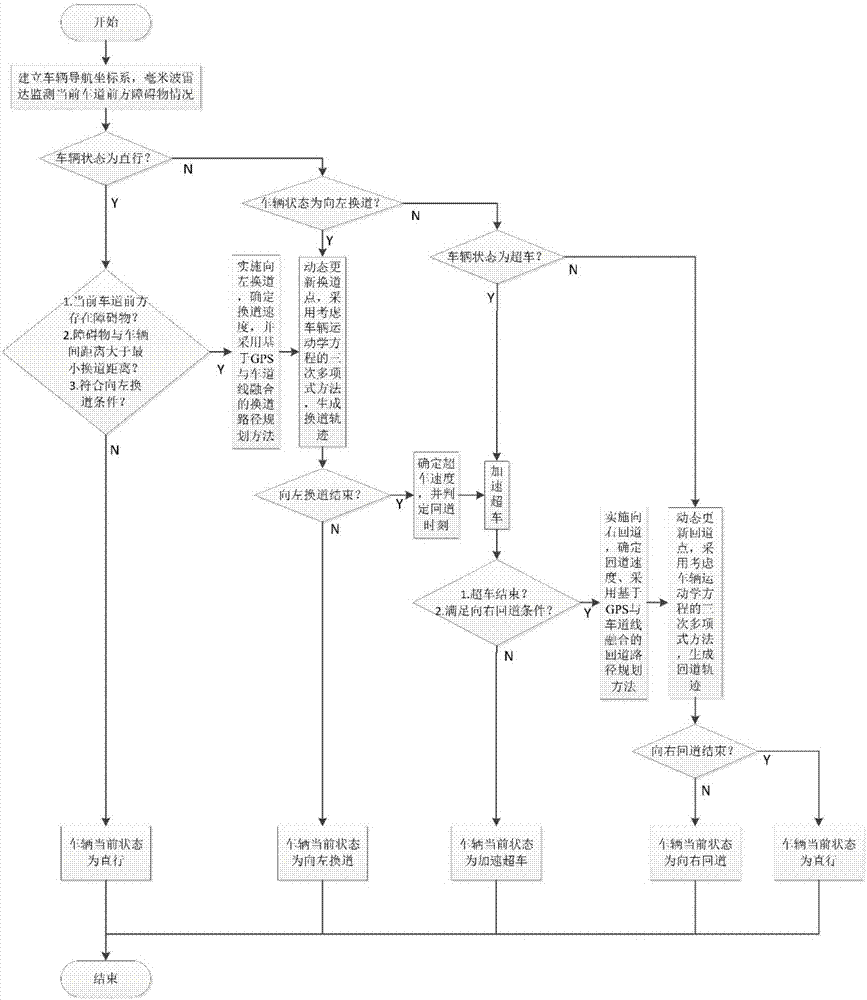
[0055] see figure 1 The flow chart shown is a motion planning method for autonomous lane-changing and overtaking of intelligent vehicles in a semi-structured environment, with a planning period of 50 ms, including the following steps:
[0056] Step 1: establish a vehicle navigation coordinate system, and determine the current driving state of the vehicle according to the driving state of the vehicle at the last moment and combined with the obstacles ahead on the current lane;
[0057] The driving state of the vehicle includes: going straight, changing lanes,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More