Variable structure adaptive trajectory tracking control method of mobile robot
A mobile robot, trajectory tracking technology, applied in non-electric variable control, two-dimensional position/channel control, control/regulation system, etc., can solve problems such as system instability, deviation of ideal mathematical model, and difficulty in achieving control indicators, etc. Achieve strong robustness and good tracking effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described below in conjunction with accompanying drawing:
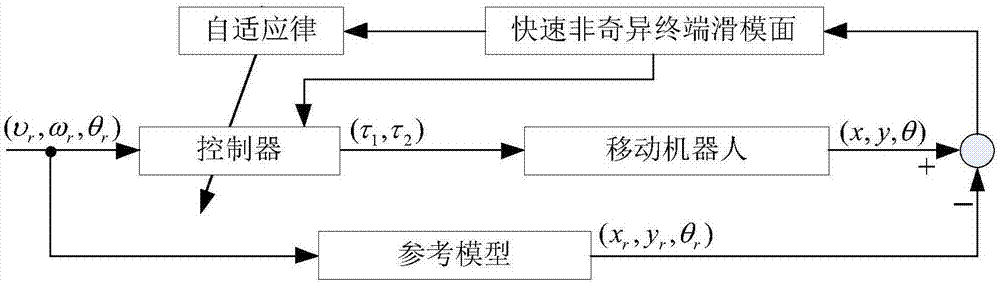
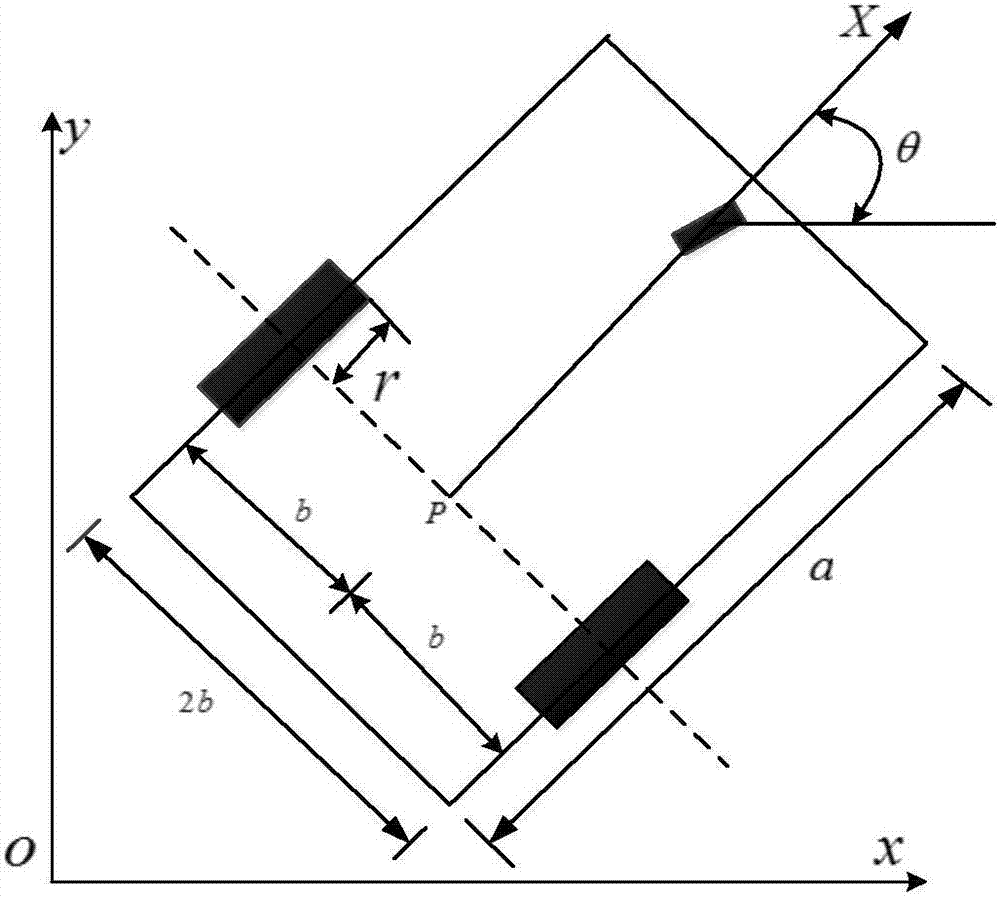
[0041] Such as Figure 1-Figure 6 As shown, a variable structure adaptive trajectory tracking control method of a mobile robot proposed by the present invention includes the following specific steps:
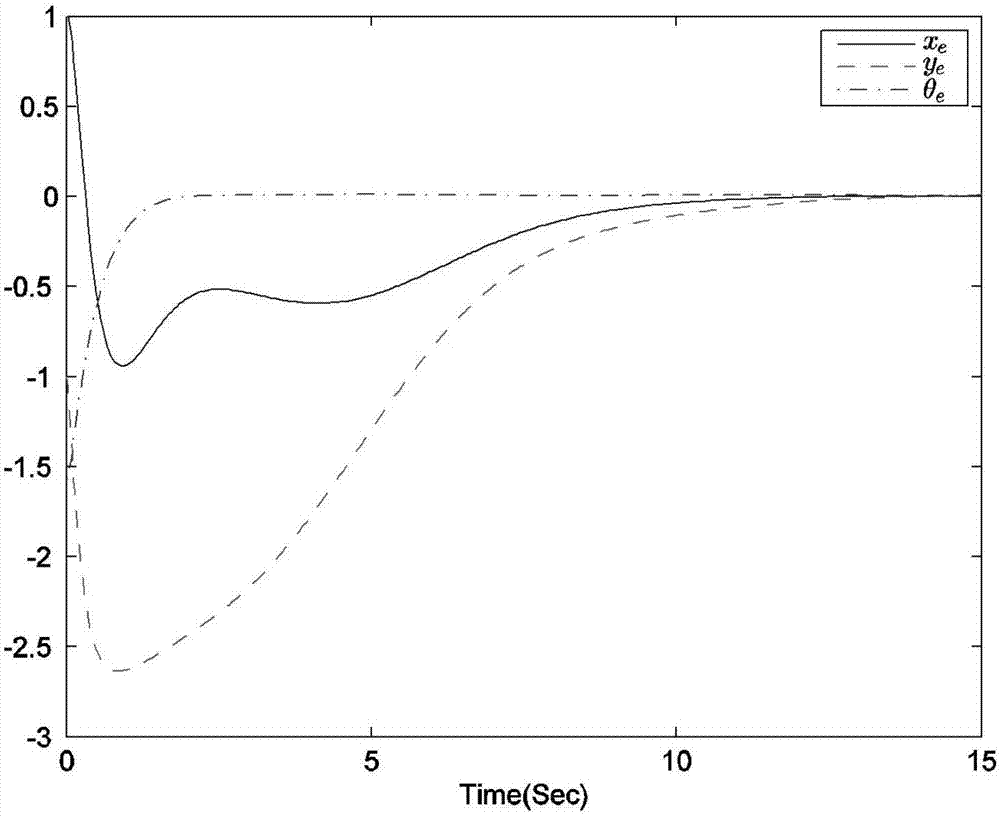
[0042] Step (1): Use the photoelectric encoder to obtain the angular velocity of the left and right wheels of the mobile robot, so as to obtain the actual linear velocity and angular velocity υ, ω of the robot, and calculate the deviation υ-υ r ,ω-ω r , where υ r ,ω r They are the reference linear velocity and angular velocity; use infrared and gyroscope to obtain the pose (x,y,θ) of the wheeled mobile robot; calculate the reference pose (x r ,y r ,θ r ) and the actual pose (x, y, θ) deviation (x e ,y e ,θ e );
[0043] Step (2): According to (x e ,y e ,θ e ) to establish a nonholonomic constrained mobile robot error model, and transform it into a second-order su...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com