

Human-computer interaction method and device used for intelligent robot
An intelligent robot and human-computer interaction technology, which is applied in the field of human-computer interaction methods and devices of intelligent robots, can solve the problems of sluggish intelligent robots and affect the user experience of robots, so as to improve the level of intelligence and humanize the user experience and interaction process. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
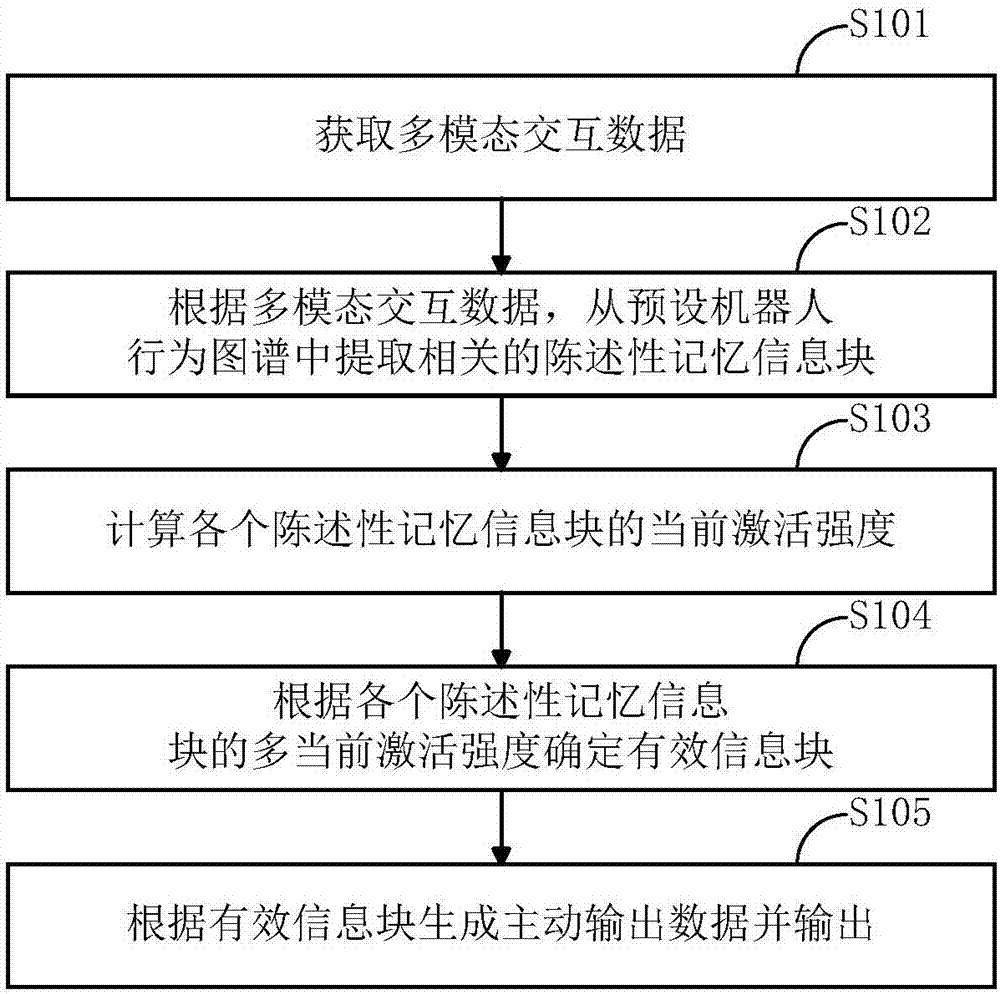
[0060] figure 1 It shows a schematic flowchart of the implementation of the human-computer interaction method for intelligent robots provided by this embodiment.
[0061] Such as figure 1 As shown, the human-computer interaction method provided by this embodiment first acquires multimodal interaction data in step S101. Specifically, in this embodiment, the multimodal interaction data acquired in step S101 of the method may include not only image data, but also audio data and / or temperature data and other interactive data. Of course, in other embodiments of the present invention, the multimodal interaction data acquired in step S101 of the method may also include other reasonable forms of interaction data, or interaction data in the forms listed above combined with other forms not listed The combination of two or more different forms of interaction data in other reasonable forms of interaction data, the present invention is not limited thereto.
[0062] After obtaining the m...
Embodiment 2
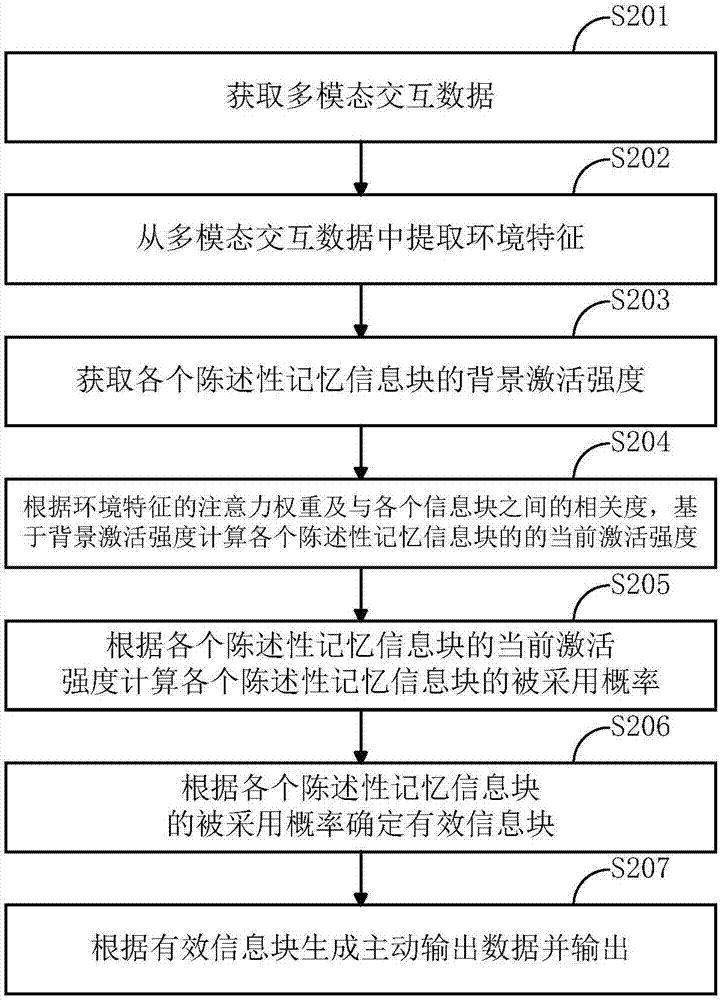
[0072] figure 2 It shows a schematic flowchart of the implementation of the human-computer interaction method for intelligent robots provided by this embodiment.
[0073] Such as figure 2 As shown, the human-computer interaction method provided by this embodiment first acquires multimodal interaction data in step S201. It should be pointed out that, in this embodiment, the implementation principle and implementation process of step S201 are similar to the implementation principle and implementation process of step S101 in the first embodiment above, so the related content of step S201 will not be repeated here.
[0074] After obtaining the multi-modal interaction data, the method will process the multi-modal interaction data in step S202, so as to extract environmental features from the multi-modal interaction data. For example, if the method includes temperature data in the multimodal interaction data acquired in step S201, then the method can also determine the current a...
Embodiment 3
[0099] Figure 4 It shows a schematic flowchart of the implementation of the human-computer interaction method for intelligent robots provided by this embodiment.
[0100] Such as Figure 4 As shown, the human-computer interaction method provided by this embodiment first obtains multimodal interaction data in step S401. It should be pointed out that, in this embodiment, the implementation principle and implementation process of step S401 are similar to the implementation principle and implementation process of step S101 in the first embodiment above, so the relevant content of step S401 will not be repeated here.
[0101] Subsequently, the method uploads the multimodal interaction data obtained in step S401 to the cloud server in step S402, so that the cloud server can determine the corresponding effective information block according to the multimodal interaction data. In this embodiment, by handing over the data processing process of the multimodal interactive data and the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More