Dual-crawler-type emergency rescue robot and control method
An emergency rescue and control method technology, which is applied in the field of dual crawler rescue and rescue robots and control, can solve the problems of limited application fields, high development and production costs, and low intelligence, so as to ensure safety and prevent mutual interference between arms. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
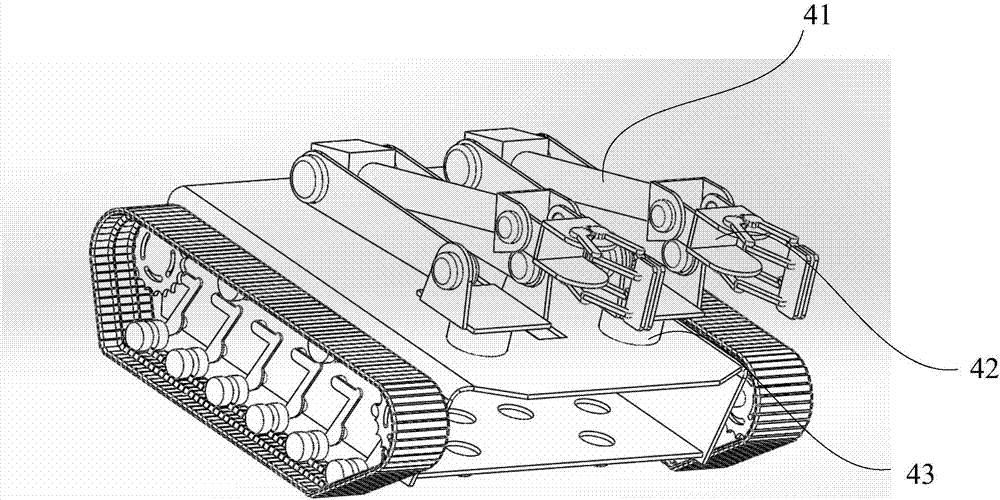
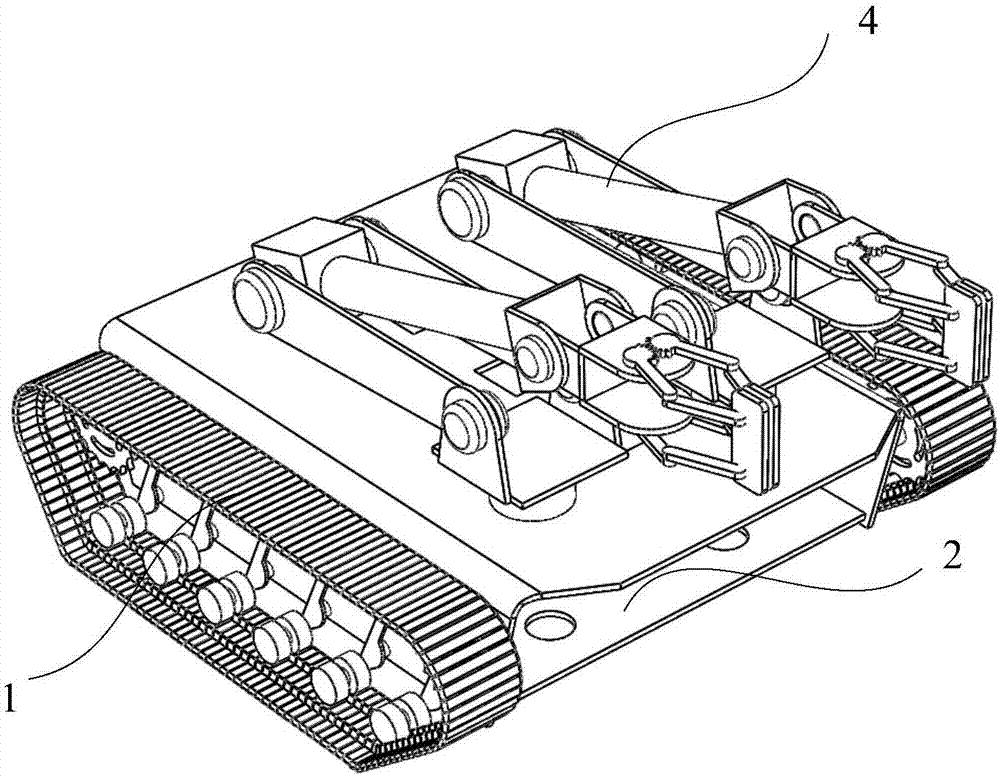
[0046] The invention provides a control method for a dual-crawler emergency rescue robot, see Figure 5 ,include:
[0047] S100: After using the STM32 chip to carry the UCOS system, use the UCOS system to convert each function into a single thread and work with multiple threads;
[0048]S200: Enter the task scheduling system, hand over the CPU usage right of the STM32 chip to the UCOS system for scheduling, and create multiple tasks; each task represents its own thread; data exchange between each thread is established.
[0049] Optionally, the STM32 chip detects the external brightness through a photosensitive sensor, and then turns on the strong light through a control relay.
[0050] Optionally, the STM32 chip is connected to each robot arm through a signal line.
[0051] Optionally, the STM32 chip receives the data from the serial port 1, and then sends the data to the ARDUINO to control the mechanical arm through the serial port 2.
[0052] Further, when the human body ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap