

Desktop industrial robot teaching system and method based on wearable device
A technology of industrial robots and wearable devices, applied in the field of automation, can solve problems such as the inability to fundamentally improve the teaching efficiency of the six-degree-of-freedom manipulator, the high requirement for operating skills, and the cumbersome teaching process.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
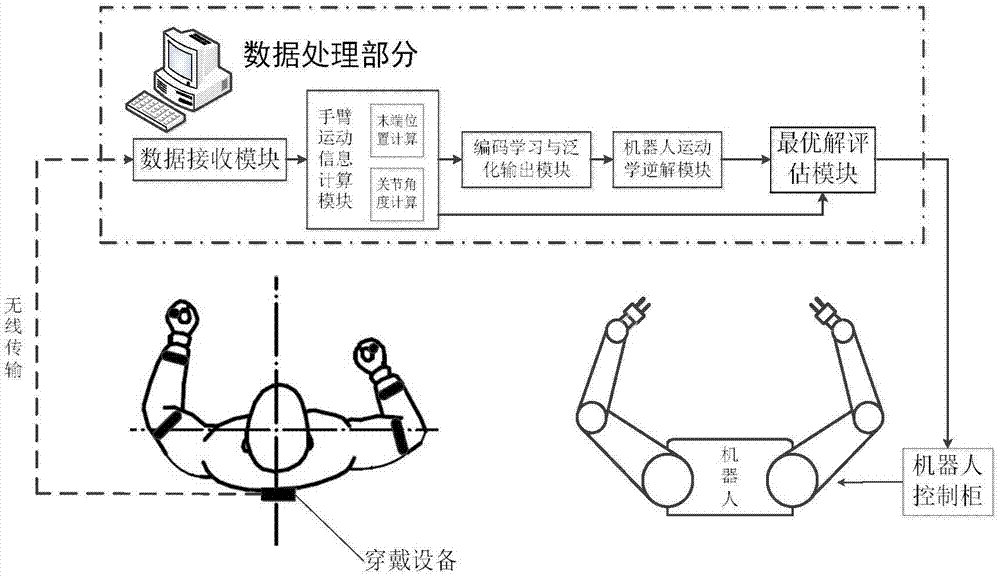
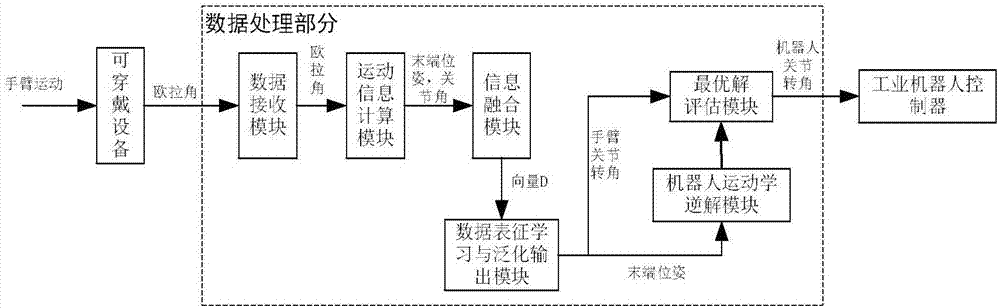
[0057] figure 1 A schematic structural diagram of a wearable device-based desktop industrial robot teaching system provided by Embodiment 1 of the present invention, figure 2 It is a schematic diagram of information transmission of the wearable device-based desktop industrial robot teaching system provided by Embodiment 1 of the present invention. like figure 1 and figure 2 As shown, the desktop industrial robot teaching system based on wearable devices provided in this embodiment includes a teaching data acquisition part, a data processing part and an industrial robot, and the data processing part is respectively connected with the teaching data acquisition part and the Industrial robot connection. The teaching system calculates and obtains the position of the end of the arm and the rotation angle of each joint by obtaining the Euler angles at the positions of the sensors on the human arm during the teaching process, and performs coded representation and generalized outp...
Embodiment 2
[0119] This embodiment provides a teaching method for a desktop industrial robot based on a wearable device. The teaching method uses a teaching system for a desktop industrial robot based on a wearable device. The teaching system includes a teaching data acquisition part, a data processing Part and industrial robot, the data processing part is connected with the teaching data acquisition part and the industrial robot respectively, the teaching data acquisition part includes a wearable device, and the wearable device includes a data control node, a data sending module and 6 sensor nodes, the 6 sensor nodes are set on the left arm and the right arm respectively, and the 3 sensor nodes of each arm are respectively set on the far shoulder joint end of the upper arm, the far elbow joint end of the forearm and the end of the arm, the data The control node is set on the back of the human body. The data processing part includes a data receiving module, an arm motion information calcul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More