

Foot and shoe composite four-foot robot
A quadruped robot and compound technology, applied in the field of mechanical automation, can solve the problems of redundant striding movements, difficult dynamic balance and high energy consumption, and achieve the effects of low power consumption, low noise and good environmental adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0021] The present invention will be described in detail below in conjunction with the accompanying drawings. However, it should be understood that the accompanying drawings are provided only for better understanding of the present invention, and they should not be construed as limiting the present invention.
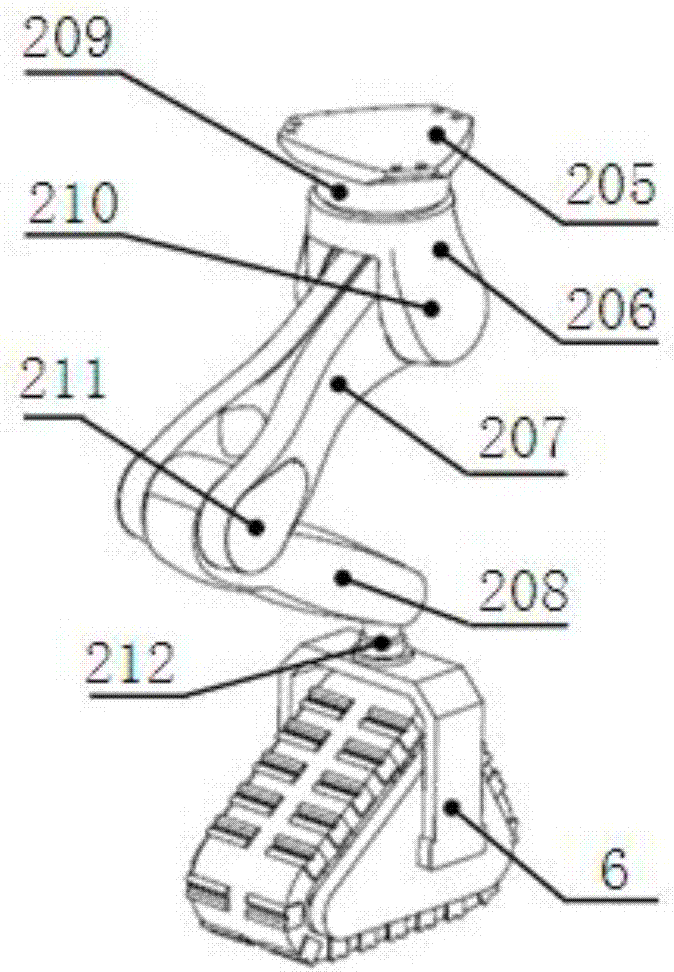
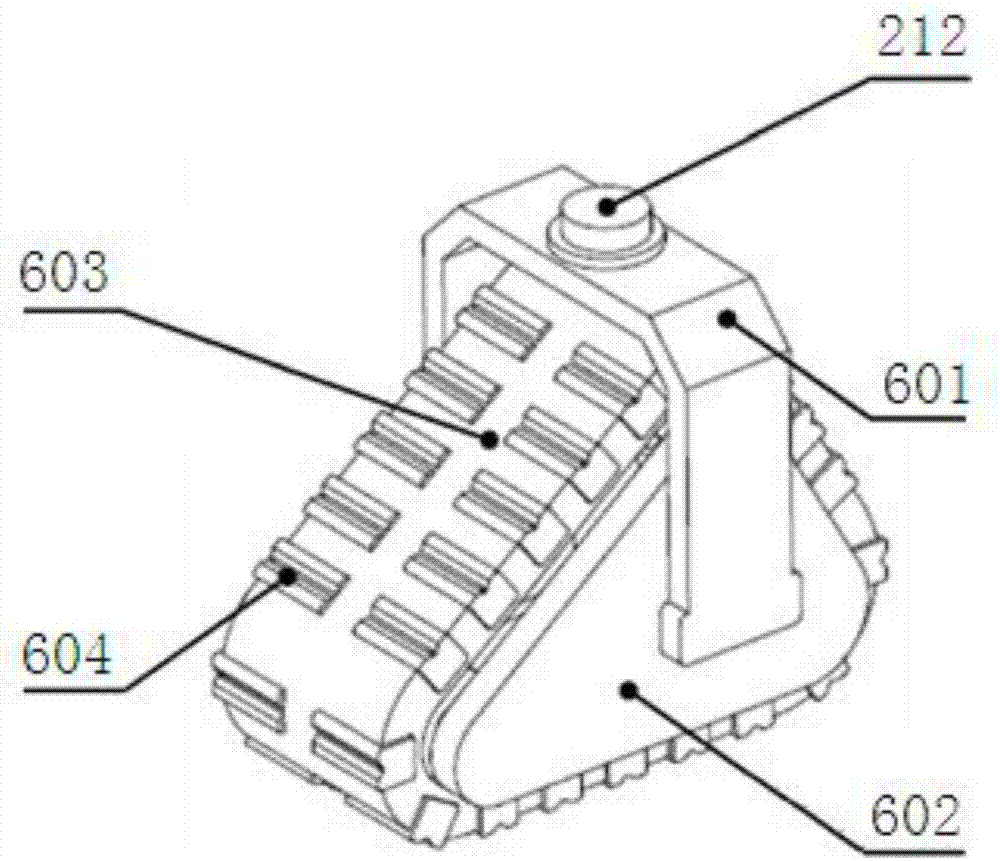
[0022] Such as figure 1As shown, the foot-foot composite quadruped robot provided by the present invention includes a back support plate 1, a leg assembly 2, an interaction sensor 3, a space positioning sensor, an environment scanning sensor, an actuator 4, a load-bearing box 5, an energy supply system and a control system. system, wherein the leg assembly 2 comprises a left front leg assembly 201, a right front leg assembly 202, a left rear leg assembly 203 and a right rear leg assembly 204, and the left front leg assembly 201, the right front leg assembly 202, the left rear leg assembly 203 and the right rear leg assembly Leg assemblies 204 are each capable of transl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More